 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniST-Pred: A Robust Unified Framework for Spatio-Temporal Traffic Forecasting in Transportation Networks Under Disruptions
Feb 15, 2026Spatio-temporal traffic forecasting is a core component of intelligent transportation systems, supporting various downstream tasks such as signal control and network-level traffic management. In real-world deployments, forecasting models must operate under structural and observational uncertainties, conditions that are rarely considered in model design. Recent approaches achieve strong short-term predictive performance by tightly coupling spatial and temporal modeling, often at the cost of increased complexity and limited modularity. In contrast, efficient time-series models capture long-range temporal dependencies without relying on explicit network structure. We propose UniST-Pred, a unified spatio-temporal forecasting framework that first decouples temporal modeling from spatial representation learning, then integrates both through adaptive representation-level fusion. To assess robustness of the proposed approach, we construct a dataset based on an agent-based, microscopic traffic simulator (MATSim) and evaluate UniST-Pred under severe network disconnection scenarios. Additionally, we benchmark UniST-Pred on standard traffic prediction datasets, demonstrating its competitive performance against existing well-established models despite a lightweight design. The results illustrate that UniST-Pred maintains strong predictive performance across both real-world and simulated datasets, while also yielding interpretable spatio-temporal representations under infrastructure disruptions. The source code and the generated dataset are available at https://anonymous.4open.science/r/UniST-Pred-EF27
Climate Adaptation-Aware Flood Prediction for Coastal Cities Using Deep Learning
Oct 29, 2025Climate change and sea-level rise (SLR) pose escalating threats to coastal cities, intensifying the need for efficient and accurate methods to predict potential flood hazards. Traditional physics-based hydrodynamic simulators, although precise, are computationally expensive and impractical for city-scale coastal planning applications. Deep Learning (DL) techniques offer promising alternatives, however, they are often constrained by challenges such as data scarcity and high-dimensional output requirements. Leveraging a recently proposed vision-based, low-resource DL framework, we develop a novel, lightweight Convolutional Neural Network (CNN)-based model designed to predict coastal flooding under variable SLR projections and shoreline adaptation scenarios. Furthermore, we demonstrate the ability of the model to generalize across diverse geographical contexts by utilizing datasets from two distinct regions: Abu Dhabi and San Francisco. Our findings demonstrate that the proposed model significantly outperforms state-of-the-art methods, reducing the mean absolute error (MAE) in predicted flood depth maps on average by nearly 20%. These results highlight the potential of our approach to serve as a scalable and practical tool for coastal flood management, empowering decision-makers to develop effective mitigation strategies in response to the growing impacts of climate change. Project Page: https://caspiannet.github.io/
Towards Autonomous and Safe Last-mile Deliveries with AI-augmented Self-driving Delivery Robots
May 28, 2023



In addition to its crucial impact on customer satisfaction, last-mile delivery (LMD) is notorious for being the most time-consuming and costly stage of the shipping process. Pressing environmental concerns combined with the recent surge of e-commerce sales have sparked renewed interest in automation and electrification of last-mile logistics. To address the hurdles faced by existing robotic couriers, this paper introduces a customer-centric and safety-conscious LMD system for small urban communities based on AI-assisted autonomous delivery robots. The presented framework enables end-to-end automation and optimization of the logistic process while catering for real-world imposed operational uncertainties, clients' preferred time schedules, and safety of pedestrians. To this end, the integrated optimization component is modeled as a robust variant of the Cumulative Capacitated Vehicle Routing Problem with Time Windows, where routes are constructed under uncertain travel times with an objective to minimize the total latency of deliveries (i.e., the overall waiting time of customers, which can negatively affect their satisfaction). We demonstrate the proposed LMD system's utility through real-world trials in a university campus with a single robotic courier. Implementation aspects as well as the findings and practical insights gained from the deployment are discussed in detail. Lastly, we round up the contributions with numerical simulations to investigate the scalability of the developed mathematical formulation with respect to the number of robotic vehicles and customers.
DClEVerNet: Deep Combinatorial Learning for Efficient EV Charging Scheduling in Large-scale Networked Facilities
May 18, 2023



With the electrification of transportation, the rising uptake of electric vehicles (EVs) might stress distribution networks significantly, leaving their performance degraded and stability jeopardized. To accommodate these new loads cost-effectively, modern power grids require coordinated or ``smart'' charging strategies capable of optimizing EV charging scheduling in a scalable and efficient fashion. With this in view, the present work focuses on reservation management programs for large-scale, networked EV charging stations. We formulate a time-coupled binary optimization problem that maximizes EV users' total welfare gain while accounting for the network's available power capacity and stations' occupancy limits. To tackle the problem at scale while retaining high solution quality, a data-driven optimization framework combining techniques from the fields of Deep Learning and Approximation Algorithms is introduced. The framework's key ingredient is a novel input-output processing scheme for neural networks that allows direct extrapolation to problem sizes substantially larger than those included in the training set. Extensive numerical simulations based on synthetic and real-world data traces verify the effectiveness and superiority of the presented approach over two representative scheduling algorithms. Lastly, we round up the contributions by listing several immediate extensions to the proposed framework and outlining the prospects for further exploration.
Multi-Agent Chance-Constrained Stochastic Shortest Path with Application to Risk-Aware Intelligent Intersection
Oct 03, 2022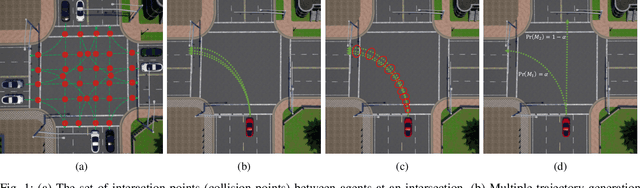
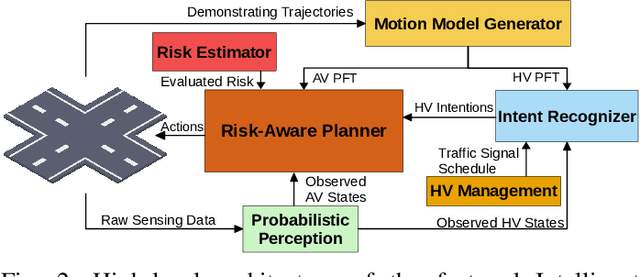


In transportation networks, where traffic lights have traditionally been used for vehicle coordination, intersections act as natural bottlenecks. A formidable challenge for existing automated intersections lies in detecting and reasoning about uncertainty from the operating environment and human-driven vehicles. In this paper, we propose a risk-aware intelligent intersection system for autonomous vehicles (AVs) as well as human-driven vehicles (HVs). We cast the problem as a novel class of Multi-agent Chance-Constrained Stochastic Shortest Path (MCC-SSP) problems and devise an exact Integer Linear Programming (ILP) formulation that is scalable in the number of agents' interaction points (e.g., potential collision points at the intersection). In particular, when the number of agents within an interaction point is small, which is often the case in intersections, the ILP has a polynomial number of variables and constraints. To further improve the running time performance, we show that the collision risk computation can be performed offline. Additionally, a trajectory optimization workflow is provided to generate risk-aware trajectories for any given intersection. The proposed framework is implemented in CARLA simulator and evaluated under a fully autonomous intersection with AVs only as well as in a hybrid setup with a signalized intersection for HVs and an intelligent scheme for AVs. As verified via simulations, the featured approach improves intersection's efficiency by up to $200\%$ while also conforming to the specified tunable risk threshold.