 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual Formulation for Chance Constrained Stochastic Shortest Path with Application to Autonomous Vehicle Behavior Planning
Feb 25, 2023



Autonomous vehicles face the problem of optimizing the expected performance of subsequent maneuvers while bounding the risk of collision with surrounding dynamic obstacles. These obstacles, such as agent vehicles, often exhibit stochastic transitions that should be accounted for in a timely and safe manner. The Constrained Stochastic Shortest Path problem (C-SSP) is a formalism for planning in stochastic environments under certain types of operating constraints. While C-SSP allows specifying constraints in the planning problem, it does not allow for bounding the probability of constraint violation, which is desired in safety-critical applications. This work's first contribution is an exact integer linear programming formulation for Chance-constrained SSP (CC-SSP) that attains deterministic policies. Second, a randomized rounding procedure is presented for stochastic policies. Third, we show that the CC-SSP formalism can be generalized to account for constraints that span through multiple time steps. Evaluation results show the usefulness of our approach in benchmark problems compared to existing approaches.
Multi-Agent Chance-Constrained Stochastic Shortest Path with Application to Risk-Aware Intelligent Intersection
Oct 03, 2022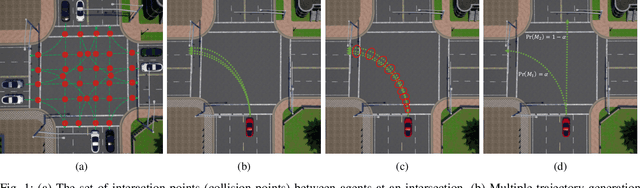
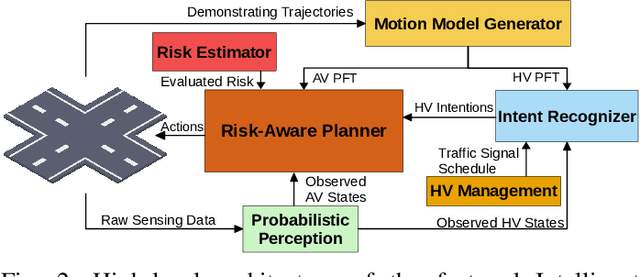


In transportation networks, where traffic lights have traditionally been used for vehicle coordination, intersections act as natural bottlenecks. A formidable challenge for existing automated intersections lies in detecting and reasoning about uncertainty from the operating environment and human-driven vehicles. In this paper, we propose a risk-aware intelligent intersection system for autonomous vehicles (AVs) as well as human-driven vehicles (HVs). We cast the problem as a novel class of Multi-agent Chance-Constrained Stochastic Shortest Path (MCC-SSP) problems and devise an exact Integer Linear Programming (ILP) formulation that is scalable in the number of agents' interaction points (e.g., potential collision points at the intersection). In particular, when the number of agents within an interaction point is small, which is often the case in intersections, the ILP has a polynomial number of variables and constraints. To further improve the running time performance, we show that the collision risk computation can be performed offline. Additionally, a trajectory optimization workflow is provided to generate risk-aware trajectories for any given intersection. The proposed framework is implemented in CARLA simulator and evaluated under a fully autonomous intersection with AVs only as well as in a hybrid setup with a signalized intersection for HVs and an intelligent scheme for AVs. As verified via simulations, the featured approach improves intersection's efficiency by up to $200\%$ while also conforming to the specified tunable risk threshold.