 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Accurate State Estimation: Kalman Filter Incorporating Motion Dynamics for 3D Multi-Object Tracking
May 12, 2025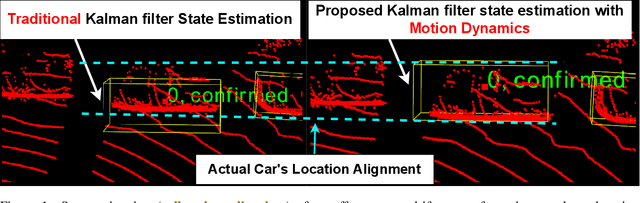
This work addresses the critical lack of precision in state estimation in the Kalman filter for 3D multi-object tracking (MOT) and the ongoing challenge of selecting the appropriate motion model. Existing literature commonly relies on constant motion models for estimating the states of objects, neglecting the complex motion dynamics unique to each object. Consequently, trajectory division and imprecise object localization arise, especially under occlusion conditions. The core of these challenges lies in the limitations of the current Kalman filter formulation, which fails to account for the variability of motion dynamics as objects navigate their environments. This work introduces a novel formulation of the Kalman filter that incorporates motion dynamics, allowing the motion model to adaptively adjust according to changes in the object's movement. The proposed Kalman filter substantially improves state estimation, localization, and trajectory prediction compared to the traditional Kalman filter. This is reflected in tracking performance that surpasses recent benchmarks on the KITTI and Waymo Open Datasets, with margins of 0.56\% and 0.81\% in higher order tracking accuracy (HOTA) and multi-object tracking accuracy (MOTA), respectively. Furthermore, the proposed Kalman filter consistently outperforms the baseline across various detectors. Additionally, it shows an enhanced capability in managing long occlusions compared to the baseline Kalman filter, achieving margins of 1.22\% in higher order tracking accuracy (HOTA) and 1.55\% in multi-object tracking accuracy (MOTA) on the KITTI dataset. The formulation's efficiency is evident, with an additional processing time of only approximately 0.078 ms per frame, ensuring its applicability in real-time applications.
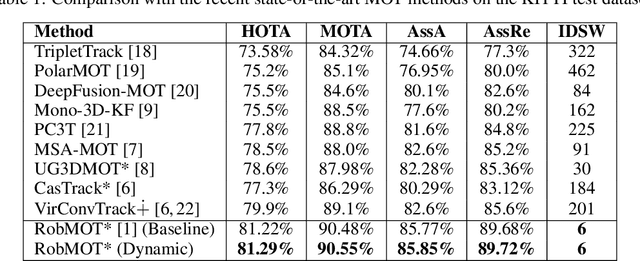
RobMOT: Robust 3D Multi-Object Tracking by Observational Noise and State Estimation Drift Mitigation on LiDAR PointCloud
May 19, 2024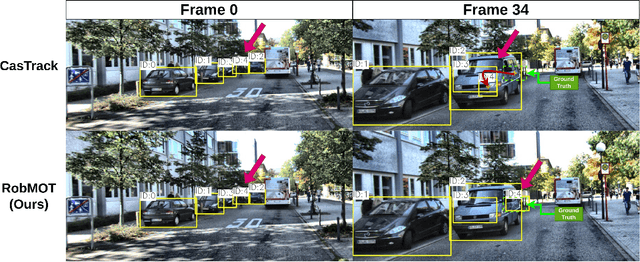
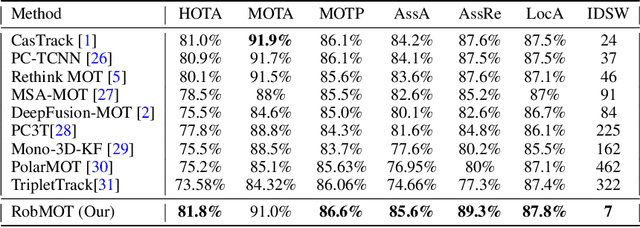
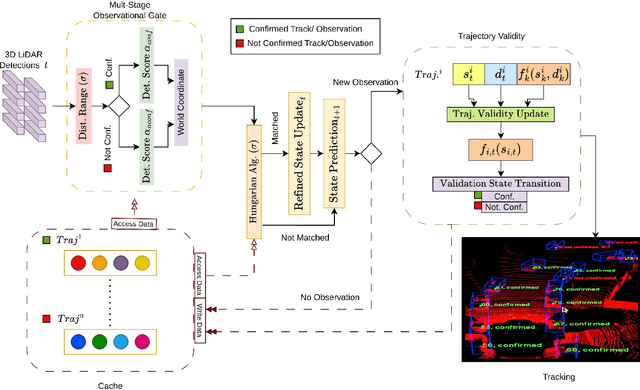
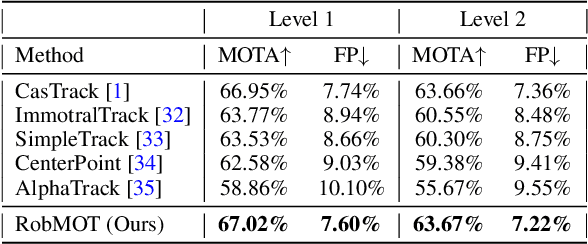
This work addresses the inherited limitations in the current state-of-the-art 3D multi-object tracking (MOT) methods that follow the tracking-by-detection paradigm, notably trajectory estimation drift for long-occluded objects in LiDAR point cloud streams acquired by autonomous cars. In addition, the absence of adequate track legitimacy verification results in ghost track accumulation. To tackle these issues, we introduce a two-fold innovation. Firstly, we propose refinement in Kalman filter that enhances trajectory drift noise mitigation, resulting in more robust state estimation for occluded objects. Secondly, we propose a novel online track validity mechanism to distinguish between legitimate and ghost tracks combined with a multi-stage observational gating process for incoming observations. This mechanism substantially reduces ghost tracks by up to 80\% and improves HOTA by 7\%. Accordingly, we propose an online 3D MOT framework, RobMOT, that demonstrates superior performance over the top-performing state-of-the-art methods, including deep learning approaches, across various detectors with up to 3.28\% margin in MOTA and 2.36\% in HOTA. RobMOT excels under challenging conditions, such as prolonged occlusions and the tracking of distant objects, with up to 59\% enhancement in processing latency.
Towards Autonomous and Safe Last-mile Deliveries with AI-augmented Self-driving Delivery Robots
May 28, 2023



In addition to its crucial impact on customer satisfaction, last-mile delivery (LMD) is notorious for being the most time-consuming and costly stage of the shipping process. Pressing environmental concerns combined with the recent surge of e-commerce sales have sparked renewed interest in automation and electrification of last-mile logistics. To address the hurdles faced by existing robotic couriers, this paper introduces a customer-centric and safety-conscious LMD system for small urban communities based on AI-assisted autonomous delivery robots. The presented framework enables end-to-end automation and optimization of the logistic process while catering for real-world imposed operational uncertainties, clients' preferred time schedules, and safety of pedestrians. To this end, the integrated optimization component is modeled as a robust variant of the Cumulative Capacitated Vehicle Routing Problem with Time Windows, where routes are constructed under uncertain travel times with an objective to minimize the total latency of deliveries (i.e., the overall waiting time of customers, which can negatively affect their satisfaction). We demonstrate the proposed LMD system's utility through real-world trials in a university campus with a single robotic courier. Implementation aspects as well as the findings and practical insights gained from the deployment are discussed in detail. Lastly, we round up the contributions with numerical simulations to investigate the scalability of the developed mathematical formulation with respect to the number of robotic vehicles and customers.
DFR-FastMOT: Detection Failure Resistant Tracker for Fast Multi-Object Tracking Based on Sensor Fusion
Feb 28, 2023



Persistent multi-object tracking (MOT) allows autonomous vehicles to navigate safely in highly dynamic environments. One of the well-known challenges in MOT is object occlusion when an object becomes unobservant for subsequent frames. The current MOT methods store objects information, like objects' trajectory, in internal memory to recover the objects after occlusions. However, they retain short-term memory to save computational time and avoid slowing down the MOT method. As a result, they lose track of objects in some occlusion scenarios, particularly long ones. In this paper, we propose DFR-FastMOT, a light MOT method that uses data from a camera and LiDAR sensors and relies on an algebraic formulation for object association and fusion. The formulation boosts the computational time and permits long-term memory that tackles more occlusion scenarios. Our method shows outstanding tracking performance over recent learning and non-learning benchmarks with about 3% and 4% margin in MOTA, respectively. Also, we conduct extensive experiments that simulate occlusion phenomena by employing detectors with various distortion levels. The proposed solution enables superior performance under various distortion levels in detection over current state-of-art methods. Our framework processes about 7,763 frames in 1.48 seconds, which is seven times faster than recent benchmarks. The framework will be available at https://github.com/MohamedNagyMostafa/DFR-FastMOT.