 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobMOT: Robust 3D Multi-Object Tracking by Observational Noise and State Estimation Drift Mitigation on LiDAR PointCloud
Paper and Code
May 19, 2024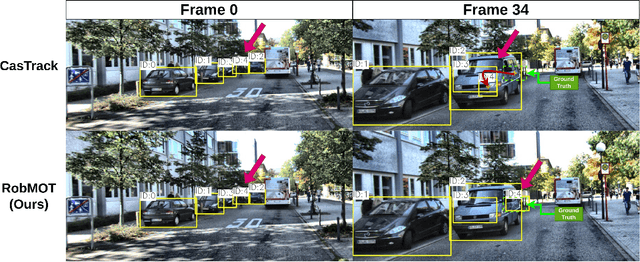
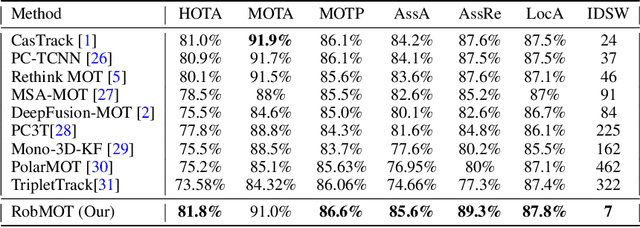
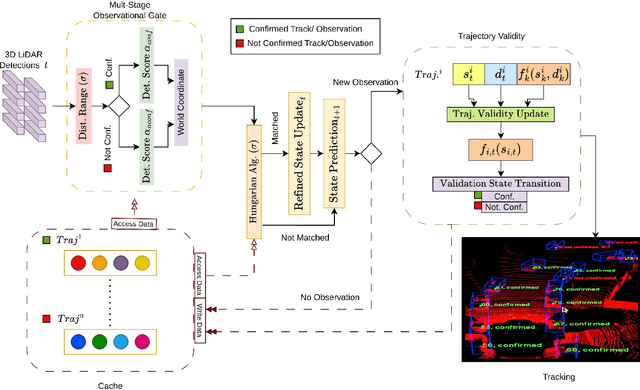
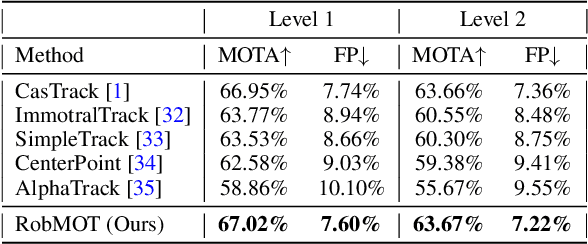
This work addresses the inherited limitations in the current state-of-the-art 3D multi-object tracking (MOT) methods that follow the tracking-by-detection paradigm, notably trajectory estimation drift for long-occluded objects in LiDAR point cloud streams acquired by autonomous cars. In addition, the absence of adequate track legitimacy verification results in ghost track accumulation. To tackle these issues, we introduce a two-fold innovation. Firstly, we propose refinement in Kalman filter that enhances trajectory drift noise mitigation, resulting in more robust state estimation for occluded objects. Secondly, we propose a novel online track validity mechanism to distinguish between legitimate and ghost tracks combined with a multi-stage observational gating process for incoming observations. This mechanism substantially reduces ghost tracks by up to 80\% and improves HOTA by 7\%. Accordingly, we propose an online 3D MOT framework, RobMOT, that demonstrates superior performance over the top-performing state-of-the-art methods, including deep learning approaches, across various detectors with up to 3.28\% margin in MOTA and 2.36\% in HOTA. RobMOT excels under challenging conditions, such as prolonged occlusions and the tracking of distant objects, with up to 59\% enhancement in processing latency.