 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Shepherding in Cluttered and Unknown Environments using Control Barrier Functions
Jul 22, 2024This paper introduces a novel control methodology designed to guide a collective of robotic-sheep in a cluttered and unknown environment using robotic-dogs. The dog-agents continuously scan the environment and compute a safe trajectory to guide the sheep to their final destination. The proposed optimization-based controller guarantees that the sheep reside within a desired distance from the reference trajectory through the use of Control Barrier Functions (CBF). Additional CBF constraints are employed simultaneously to ensure inter-agent and obstacle collision avoidance. The efficacy of the proposed approach is rigorously tested in simulation, which demonstrates the successful herding of the robotic-sheep within complex and cluttered environments.
Static Hovering Realization for Multirotor Aerial Vehicles with Tiltable Propellers
Jul 22, 2022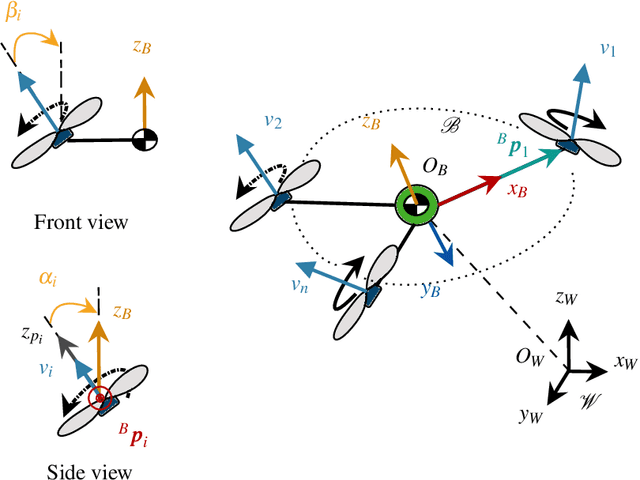
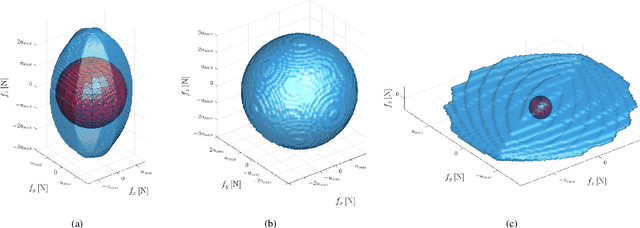
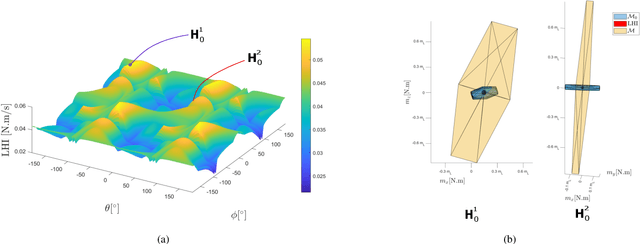

This paper presents a theoretical study on the ability of multi-rotor aerial vehicles (MRAVs) with tiltable propellers to achieve and sustain static hovering at different orientations. To analyze the ability of MRAVs with tiltable propellers to achieve static hovering, a novel linear map between the platform's control inputs and applied forces and moments is introduced. The relation between the introduced map and the platform's ability to hover at different orientations is developed. Correspondingly, the conditions for MRAVs with tiltable propellers to realize and sustain static hovering are detailed. A numerical metric is then introduced, which reflects the ability of MRAVs to sustain static hovering at different orientations. A subclass of MRAVs with tiltable propellers is defined as the Critically Statically Hoverable platforms (CSH), where CSH platforms are MRAVs that cannot sustain static hovering with fixed propellers, but can achieve static hovering with tilting propellers. Finally, extensive simulations are conducted to test and validate the above findings, and to demonstrate the effect of the proposed numerical metric on the platform's dynamics.
Design of Dynamics Invariant LSTM for Touch Based Human-UAV Interaction Detection
Jul 12, 2022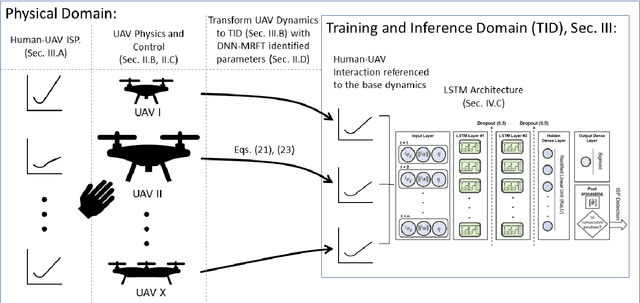
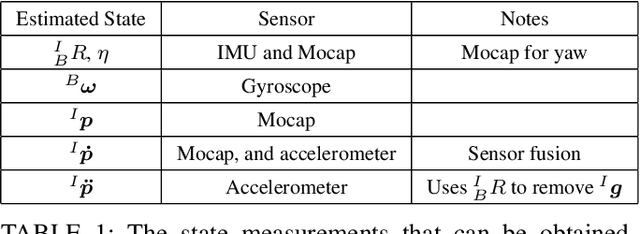
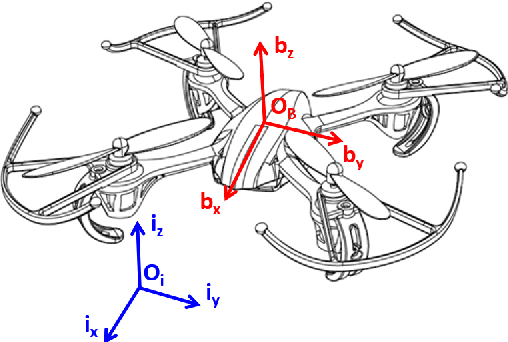
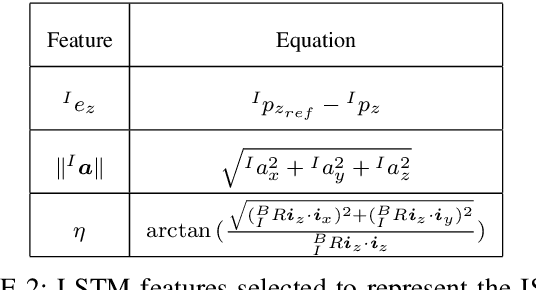
The field of Unmanned Aerial Vehicles (UAVs) has reached a high level of maturity in the last few years. Hence, bringing such platforms from closed labs, to day-to-day interactions with humans is important for commercialization of UAVs. One particular human-UAV scenario of interest for this paper is the payload handover scheme, where a UAV hands over a payload to a human upon their request. In this scope, this paper presents a novel real-time human-UAV interaction detection approach, where Long short-term memory (LSTM) based neural network is developed to detect state profiles resulting from human interaction dynamics. A novel data pre-processing technique is presented; this technique leverages estimated process parameters of training and testing UAVs to build dynamics invariant testing data. The proposed detection algorithm is lightweight and thus can be deployed in real-time using off the shelf UAV platforms; in addition, it depends solely on inertial and position measurements present on any classical UAV platform. The proposed approach is demonstrated on a payload handover task between multirotor UAVs and humans. Training and testing data were collected using real-time experiments. The detection approach has achieved an accuracy of 96\%, giving no false positives even in the presence of external wind disturbances, and when deployed and tested on two different UAVs.
DeepMoTIon: Learning to Navigate Like Humans
Mar 02, 2019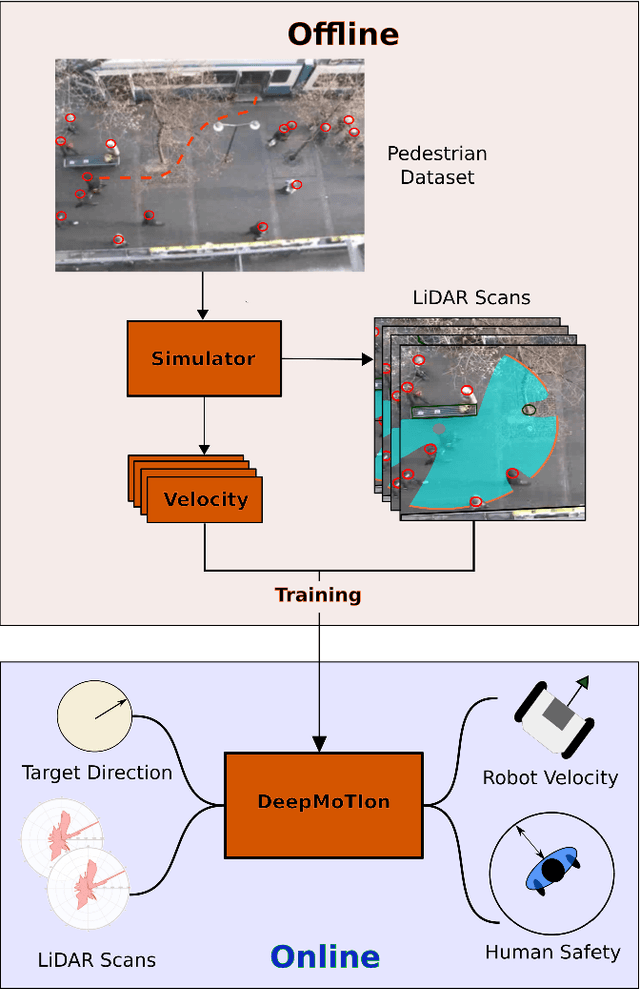
We present a novel human-aware navigation approach, where the robot learns to mimic humans to navigate safely in crowds. The presented model referred to as DeepMoTIon, is trained with pedestrian surveillance data to predict human velocity. The robot processes LiDAR scans via the trained network to navigate to the target location. We conduct extensive experiments to assess the different components of our network and prove the necessity of each to imitate humans. Our experiments show that DeepMoTIon outperforms state-of-the-art in terms of human imitation and reaches the target on 100% of the test cases without breaching humans' safe distance.