 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStatic Hovering Realization for Multirotor Aerial Vehicles with Tiltable Propellers
Paper and Code
Jul 22, 2022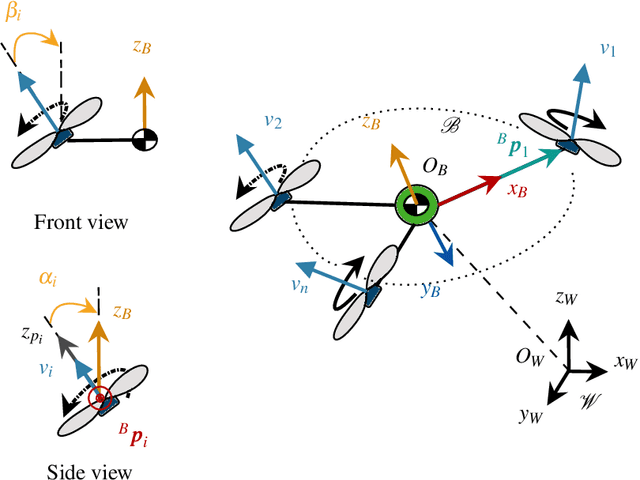
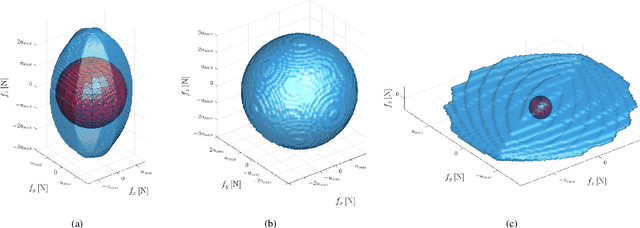
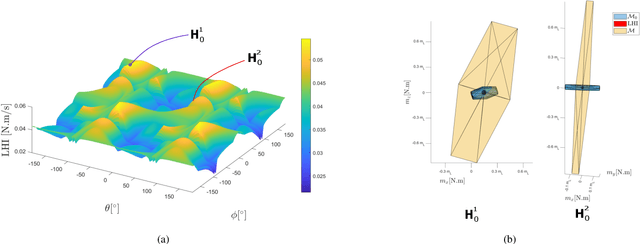

This paper presents a theoretical study on the ability of multi-rotor aerial vehicles (MRAVs) with tiltable propellers to achieve and sustain static hovering at different orientations. To analyze the ability of MRAVs with tiltable propellers to achieve static hovering, a novel linear map between the platform's control inputs and applied forces and moments is introduced. The relation between the introduced map and the platform's ability to hover at different orientations is developed. Correspondingly, the conditions for MRAVs with tiltable propellers to realize and sustain static hovering are detailed. A numerical metric is then introduced, which reflects the ability of MRAVs to sustain static hovering at different orientations. A subclass of MRAVs with tiltable propellers is defined as the Critically Statically Hoverable platforms (CSH), where CSH platforms are MRAVs that cannot sustain static hovering with fixed propellers, but can achieve static hovering with tilting propellers. Finally, extensive simulations are conducted to test and validate the above findings, and to demonstrate the effect of the proposed numerical metric on the platform's dynamics.