 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Role of Time Delay in Sim2real Transfer of Reinforcement Learning for Cyber-Physical Systems
Sep 30, 2022


This paper analyzes the simulation to reality gap in reinforcement learning (RL) cyber-physical systems with fractional delays (i.e. delays that are non-integer multiple of the sampling period). The consideration of fractional delay has important implications on the nature of the cyber-physical system considered. Systems with delays are non-Markovian, and the system state vector needs to be extended to make the system Markovian. We show that this is not possible when the delay is in the output, and the problem would always be non-Markovian. Based on this analysis, a sampling scheme is proposed that results in efficient RL training and agents that perform well in realistic multirotor unmanned aerial vehicle simulations. We demonstrate that the resultant agents do not produce excessive oscillations, which is not the case with RL agents that do not consider time delay in the model.
Analysis of the Effect of Time Delay for Unmanned Aerial Vehicles with Applications to Vision Based Navigation
Sep 05, 2022

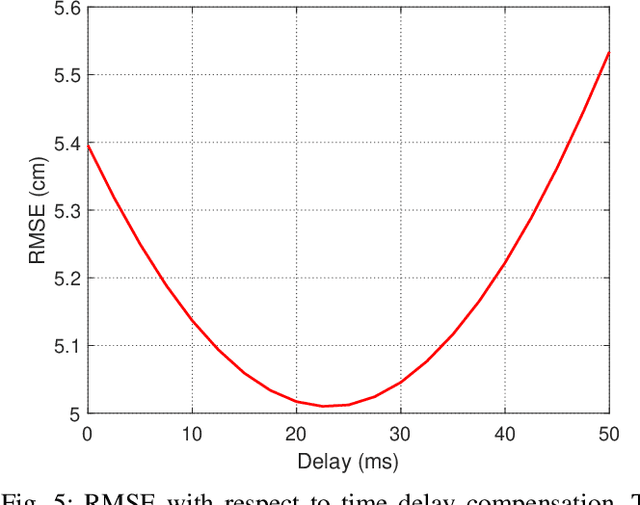
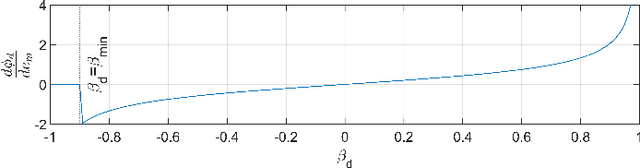
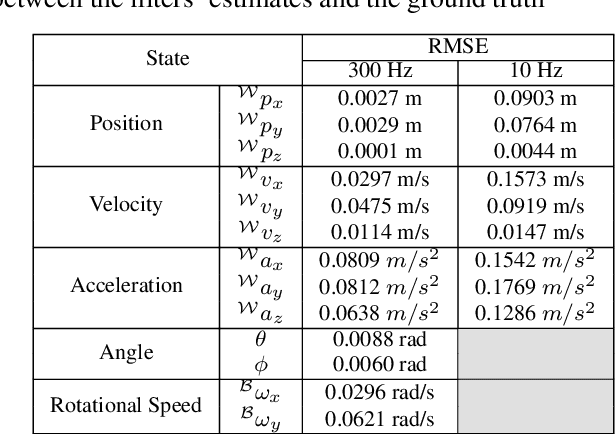
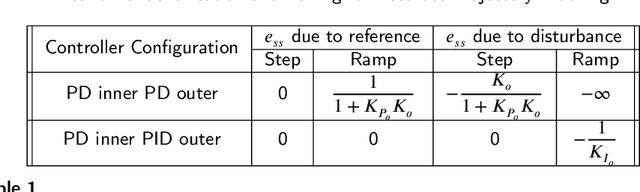
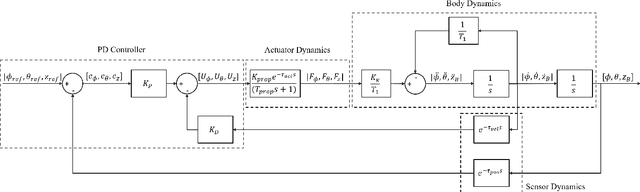
In this paper, we analyze the effect of time delay dynamics on controller design for Unmanned Aerial Vehicles (UAVs) with vision based navigation. Time delay is an inevitable phenomenon in cyber-physical systems, and has important implications on controller design and trajectory generation for UAVs. The impact of time delay on UAV dynamics increases with the use of the slower vision based navigation stack. We show that the existing models in the literature, which exclude time delay, are unsuitable for controller tuning since a trivial solution for minimizing an error cost functional always exists. The trivial solution that we identify suggests use of infinite controller gains to achieve optimal performance, which contradicts practical findings. We avoid such shortcomings by introducing a novel nonlinear time delay model for UAVs, and then obtain a set of linear decoupled models corresponding to each of the UAV control loops. The cost functional of the linearized time delay model of angular and altitude dynamics is analyzed, and in contrast to the delay-free models, we show the existence of finite optimal controller parameters. Due to the use of time delay models, we experimentally show that the proposed model accurately represents system stability limits. Due to time delay consideration, we achieved a tracking results of RMSE 5.01 cm when tracking a lemniscate trajectory with a peak velocity of 2.09 m/s using visual odometry (VO) based UAV navigation, which is on par with the state-of-the-art.
Design of Dynamics Invariant LSTM for Touch Based Human-UAV Interaction Detection
Jul 12, 2022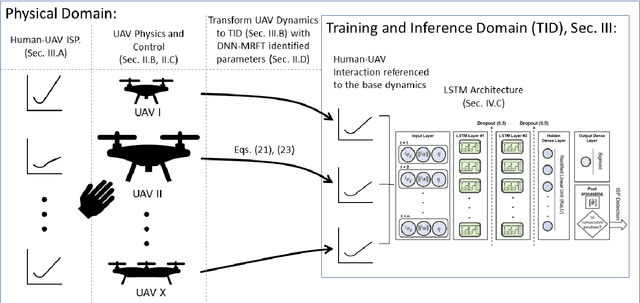
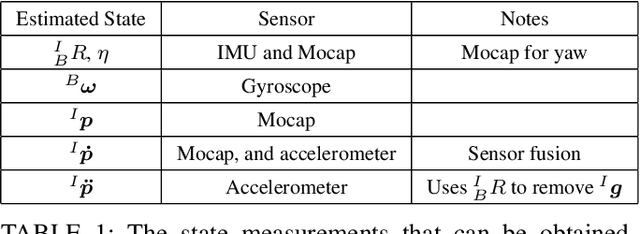
The field of Unmanned Aerial Vehicles (UAVs) has reached a high level of maturity in the last few years. Hence, bringing such platforms from closed labs, to day-to-day interactions with humans is important for commercialization of UAVs. One particular human-UAV scenario of interest for this paper is the payload handover scheme, where a UAV hands over a payload to a human upon their request. In this scope, this paper presents a novel real-time human-UAV interaction detection approach, where Long short-term memory (LSTM) based neural network is developed to detect state profiles resulting from human interaction dynamics. A novel data pre-processing technique is presented; this technique leverages estimated process parameters of training and testing UAVs to build dynamics invariant testing data. The proposed detection algorithm is lightweight and thus can be deployed in real-time using off the shelf UAV platforms; in addition, it depends solely on inertial and position measurements present on any classical UAV platform. The proposed approach is demonstrated on a payload handover task between multirotor UAVs and humans. Training and testing data were collected using real-time experiments. The detection approach has achieved an accuracy of 96\%, giving no false positives even in the presence of external wind disturbances, and when deployed and tested on two different UAVs.
Unified Identification and Tuning Approach Using Deep Neural Networks For Visual Servoing Applications
Jul 04, 2021


Vision based control of Unmanned Aerial Vehicles (UAVs) has been adopted by a wide range of applications due to the availability of low-cost on-board sensors and computers. Tuning such systems to work properly requires extensive domain specific experience which limits the growth of emerging applications. Moreover, obtaining performance limits of UAV based visual servoing with the current state-of-the-art is not possible due to the complexity of the models used. In this paper, we present a systematic approach for real-time identification and tuning of visual servoing systems based on a novel robustified version of the recent deep neural networks with the modified relay feedback test (DNN-MRFT) approach. The proposed robust DNN-MRFT algorithm can be used with a multitude of vision sensors and estimation algorithms despite the high levels of sensor's noise. Sensitivity of MRFT to perturbations is investigated and its effect on identification and tuning performance is analyzed. DNN-MRFT was able to detect performance changes due to the use of slower vision sensors, or due to the integration of accelerometer measurements. Experimental identification results were closely matching simulation results, which can be used to explain system behaviour and anticipate the closed loop performance limits given a certain hardware and software setup. Finally, we demonstrate the capability of the DNN-MRFT tuned visual servoing systems to reject external disturbances. Some advantages of the suggested robust identification approach compared to existing visual servoing design approaches are presented.
Dynamic Based Estimator for UAVs with Real-time Identification Using DNN and the Modified Relay Feedback Test
Jun 14, 2021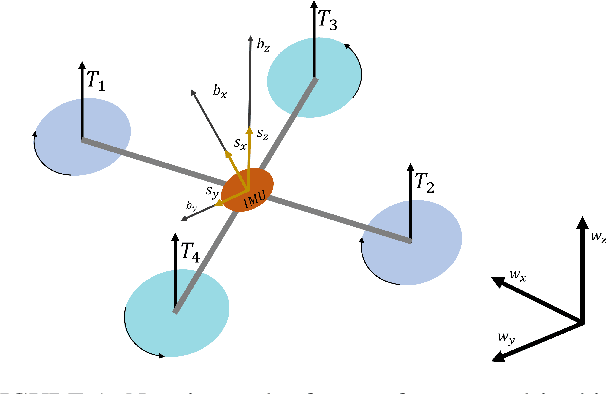
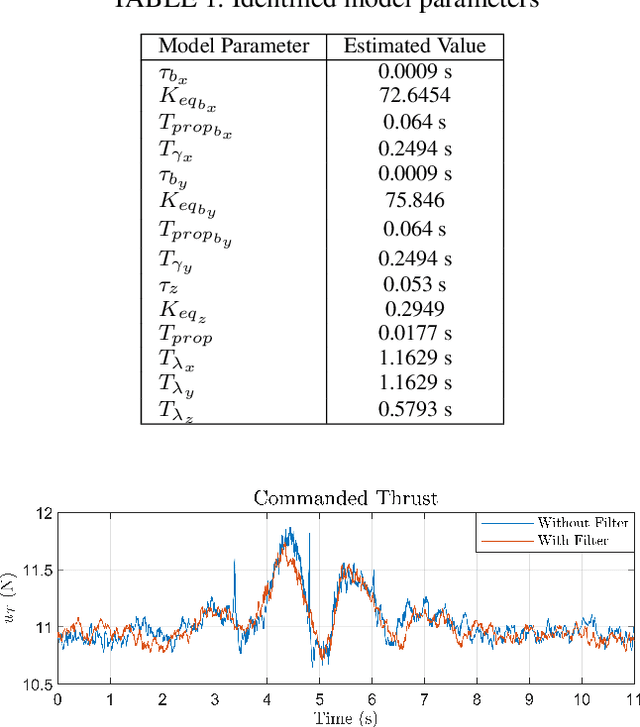
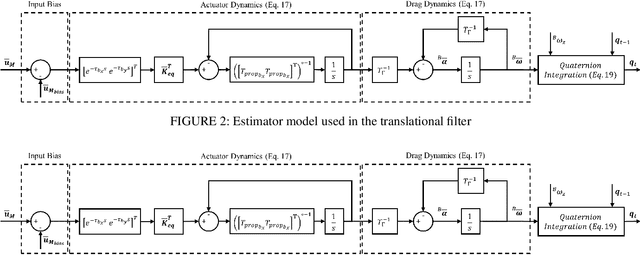
Control performance of Unmanned Aerial Vehicles (UAVs) is directly affected by their ability to estimate their states accurately. With the increasing popularity of autonomous UAV solutions in real world applications, it is imperative to develop robust adaptive estimators that can ameliorate sensor noises in low-cost UAVs. Utilizing the knowledge of UAV dynamics in estimation can provide significant advantages, but remains challenging due to the complex and expensive pre-flight experiments required to obtain UAV dynamic parameters. In this paper, we propose two decoupled dynamic model based Extended Kalman Filters for UAVs, that provide high rate estimates for position, and velocity of rotational and translational states, as well as filtered inertial acceleration. The dynamic model parameters are estimated online using the Deep Neural Network and Modified Relay Feedback Test (DNN-MRFT) framework, without requiring any prior knowledge of the UAV physical parameters. The designed filters with real-time identified process model parameters are tested experimentally and showed two advantages. Firstly, smooth and lag-free estimates of the UAV rotational speed and inertial acceleration are obtained, and used to improve the closed loop system performance, reducing the controller action by over 6 %. Secondly, the proposed approach enabled the UAV to track aggressive trajectories with low rate position measurements, a task usually infeasible under those conditions. The experimental data shows that we achieved estimation performance matching other methods that requires full knowledge of the UAV parameters.
Real-time Identification and Tuning of Multirotors Based on Deep Neural Networks for Accurate Trajectory Tracking Under Wind Disturbances
Jun 07, 2021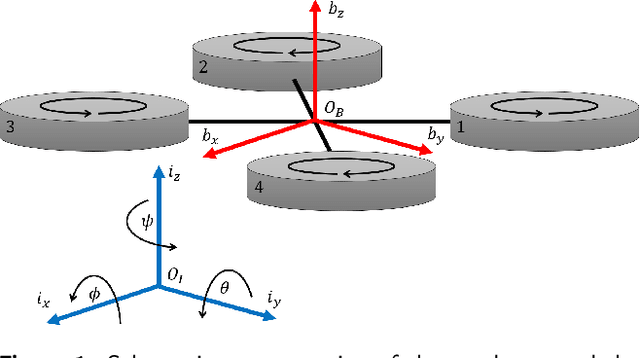

High performance trajectory tracking for multirotor Unmanned Aerial Vehicles (UAVs) is a fast growing research area due to the increase in popularity and demand. In many applications, the multirotor UAV dynamics would change in-flight resulting in performance degradation, or even instability, such that the control system is required to adapt its parameters to the new dynamics. In this paper, we developed a real-time identification approach based on Deep Neural Networks (DNNs) and the Modified Relay Feedback Test (MRFT) to optimally tune PID controllers suitable for aggressive trajectory tracking. We also propose a feedback linearization technique along with additional feedforward terms to achieve high trajectory tracking performance. In addition, we investigate and analyze different PID configurations for position controllers to maximize the tracking performance in the presence of wind disturbance and system parameter changes, and provide a systematic design methodology to trade-off performance for robustness. We prove the effectiveness and applicability of our developed approach through a set of experiments where accurate trajectory tracking is maintained despite significant changes to the UAV aerodynamic characteristics and the application of external wind. We demonstrate low discrepancy between simulation and experimental results which proves the potential of using the suggested approach for planning and fault detection tasks. The achieved tracking results on figure-eight trajectory is on par with the state-of-the-art.