 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Identification and Tuning of Multirotors Based on Deep Neural Networks for Accurate Trajectory Tracking Under Wind Disturbances
Jun 07, 2021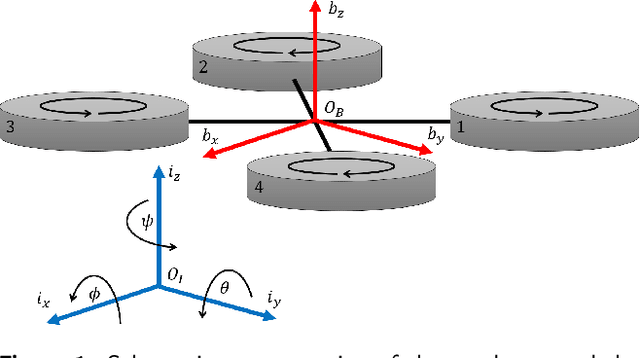
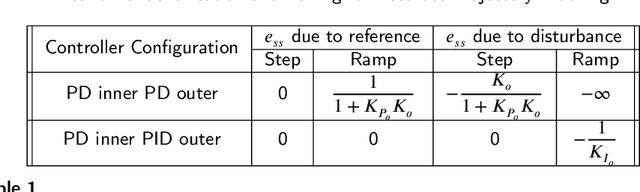
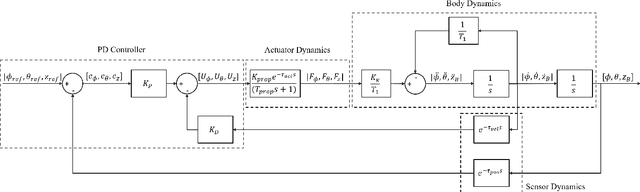

High performance trajectory tracking for multirotor Unmanned Aerial Vehicles (UAVs) is a fast growing research area due to the increase in popularity and demand. In many applications, the multirotor UAV dynamics would change in-flight resulting in performance degradation, or even instability, such that the control system is required to adapt its parameters to the new dynamics. In this paper, we developed a real-time identification approach based on Deep Neural Networks (DNNs) and the Modified Relay Feedback Test (MRFT) to optimally tune PID controllers suitable for aggressive trajectory tracking. We also propose a feedback linearization technique along with additional feedforward terms to achieve high trajectory tracking performance. In addition, we investigate and analyze different PID configurations for position controllers to maximize the tracking performance in the presence of wind disturbance and system parameter changes, and provide a systematic design methodology to trade-off performance for robustness. We prove the effectiveness and applicability of our developed approach through a set of experiments where accurate trajectory tracking is maintained despite significant changes to the UAV aerodynamic characteristics and the application of external wind. We demonstrate low discrepancy between simulation and experimental results which proves the potential of using the suggested approach for planning and fault detection tasks. The achieved tracking results on figure-eight trajectory is on par with the state-of-the-art.