 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of Dynamics Invariant LSTM for Touch Based Human-UAV Interaction Detection
Paper and Code
Jul 12, 2022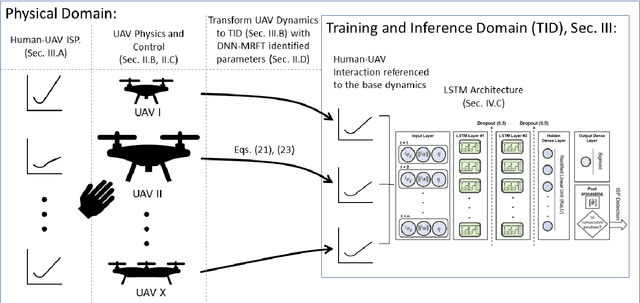
The field of Unmanned Aerial Vehicles (UAVs) has reached a high level of maturity in the last few years. Hence, bringing such platforms from closed labs, to day-to-day interactions with humans is important for commercialization of UAVs. One particular human-UAV scenario of interest for this paper is the payload handover scheme, where a UAV hands over a payload to a human upon their request. In this scope, this paper presents a novel real-time human-UAV interaction detection approach, where Long short-term memory (LSTM) based neural network is developed to detect state profiles resulting from human interaction dynamics. A novel data pre-processing technique is presented; this technique leverages estimated process parameters of training and testing UAVs to build dynamics invariant testing data. The proposed detection algorithm is lightweight and thus can be deployed in real-time using off the shelf UAV platforms; in addition, it depends solely on inertial and position measurements present on any classical UAV platform. The proposed approach is demonstrated on a payload handover task between multirotor UAVs and humans. Training and testing data were collected using real-time experiments. The detection approach has achieved an accuracy of 96\%, giving no false positives even in the presence of external wind disturbances, and when deployed and tested on two different UAVs.