Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepMoTIon: Learning to Navigate Like Humans
Paper and Code
Mar 02, 2019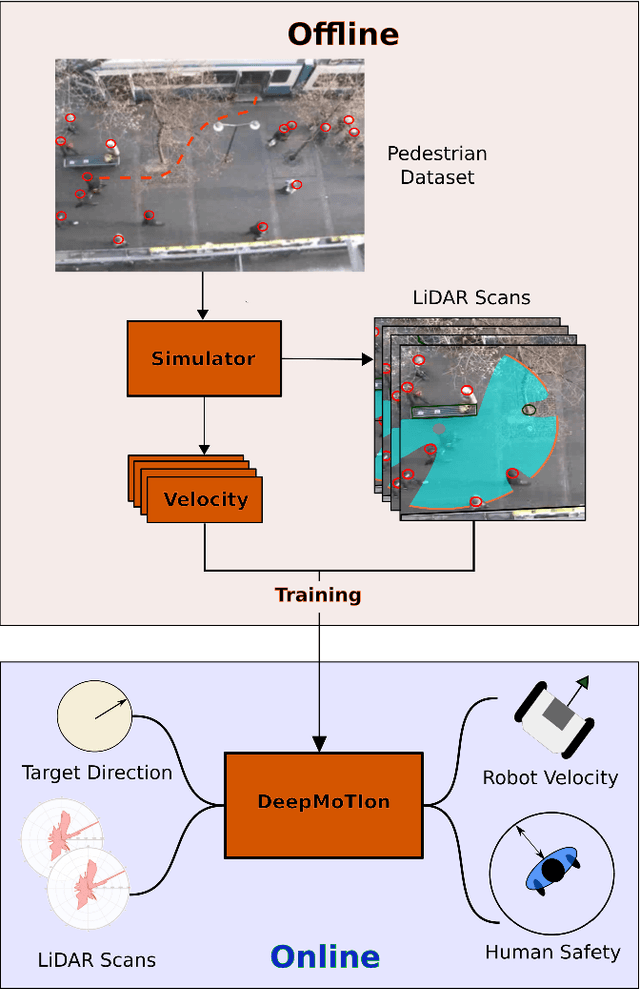
We present a novel human-aware navigation approach, where the robot learns to mimic humans to navigate safely in crowds. The presented model referred to as DeepMoTIon, is trained with pedestrian surveillance data to predict human velocity. The robot processes LiDAR scans via the trained network to navigate to the target location. We conduct extensive experiments to assess the different components of our network and prove the necessity of each to imitate humans. Our experiments show that DeepMoTIon outperforms state-of-the-art in terms of human imitation and reaches the target on 100% of the test cases without breaching humans' safe distance.
* 7 pages
View paper on