 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Real-World Energy Management Dataset from a Smart Company Building for Optimization and Machine Learning
Mar 14, 2025We present a large real-world dataset obtained from monitoring a smart company facility over the course of six years, from 2018 to 2023. The dataset includes energy consumption data from various facility areas and components, energy production data from a photovoltaic system and a combined heat and power plant, operational data from heating and cooling systems, and weather data from an on-site weather station. The measurement sensors installed throughout the facility are organized in a hierarchical metering structure with multiple sub-metering levels, which is reflected in the dataset. The dataset contains measurement data from 72 energy meters, 9 heat meters and a weather station. Both raw and processed data at different processing levels, including labeled issues, is available. In this paper, we describe the data acquisition and post-processing employed to create the dataset. The dataset enables the application of a wide range of methods in the domain of energy management, including optimization, modeling, and machine learning to optimize building operations and reduce costs and carbon emissions.
Stacked Confusion Reject Plots (SCORE)
Jun 25, 2024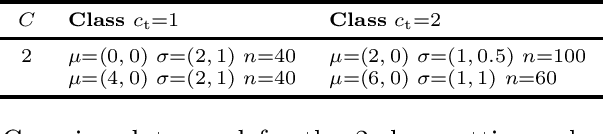
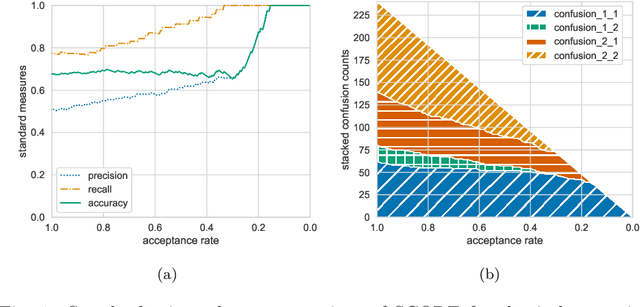
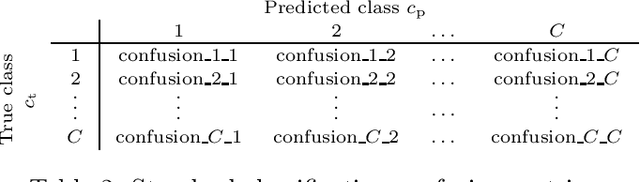
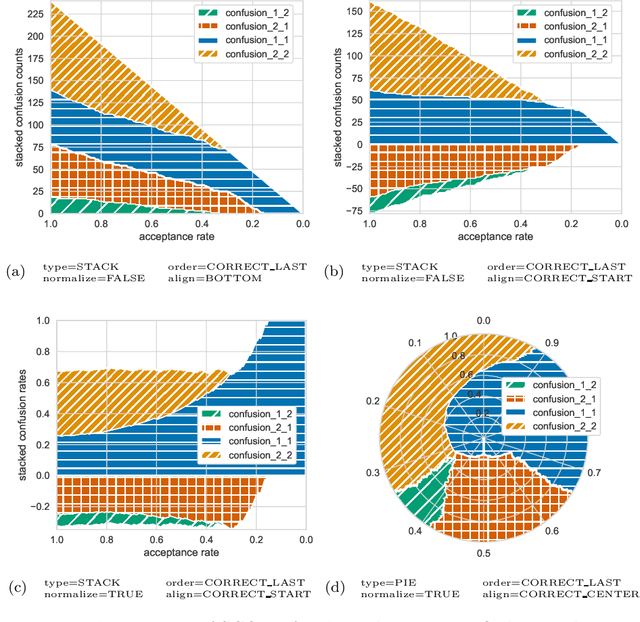
Machine learning is more and more applied in critical application areas like health and driver assistance. To minimize the risk of wrong decisions, in such applications it is necessary to consider the certainty of a classification to reject uncertain samples. An established tool for this are reject curves that visualize the trade-off between the number of rejected samples and classification performance metrics. We argue that common reject curves are too abstract and hard to interpret by non-experts. We propose Stacked Confusion Reject Plots (SCORE) that offer a more intuitive understanding of the used data and the classifier's behavior. We present example plots on artificial Gaussian data to document the different options of SCORE and provide the code as a Python package.
Precision and Recall Reject Curves for Classification
Aug 17, 2023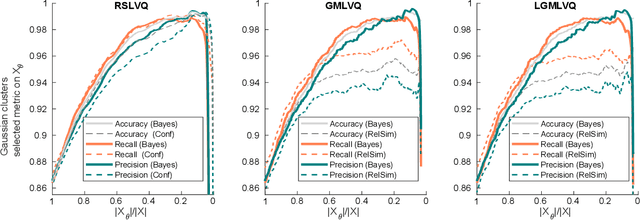
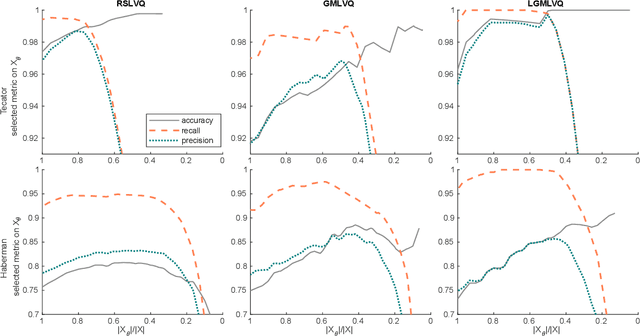
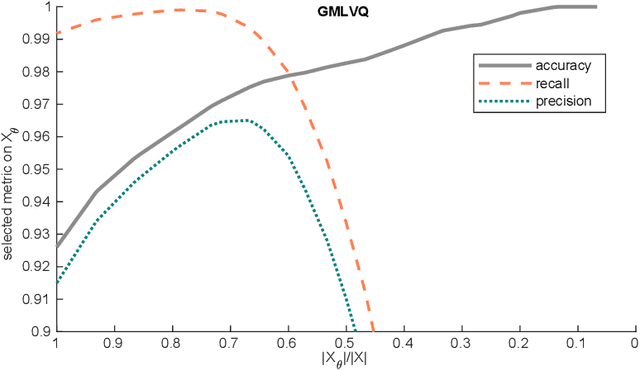
For some classification scenarios, it is desirable to use only those classification instances that a trained model associates with a high certainty. To obtain such high-certainty instances, previous work has proposed accuracy-reject curves. Reject curves allow to evaluate and compare the performance of different certainty measures over a range of thresholds for accepting or rejecting classifications. However, the accuracy may not be the most suited evaluation metric for all applications, and instead precision or recall may be preferable. This is the case, for example, for data with imbalanced class distributions. We therefore propose reject curves that evaluate precision and recall, the recall-reject curve and the precision-reject curve. Using prototype-based classifiers from learning vector quantization, we first validate the proposed curves on artificial benchmark data against the accuracy reject curve as a baseline. We then show on imbalanced benchmarks and medical, real-world data that for these scenarios, the proposed precision- and recall-curves yield more accurate insights into classifier performance than accuracy reject curves.
Designing Interaction for Multi-agent Cooperative System in an Office Environment
Feb 15, 2020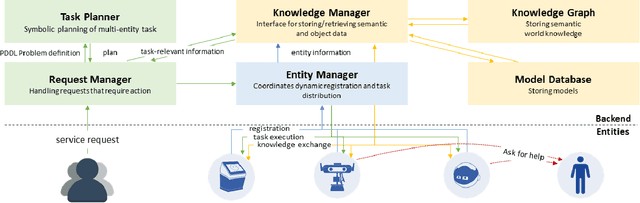
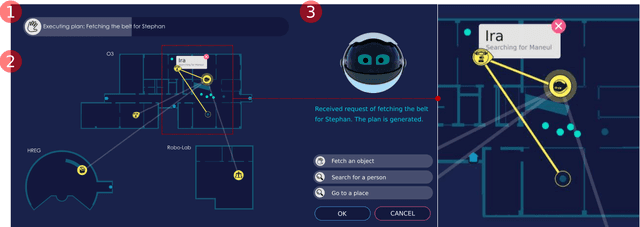
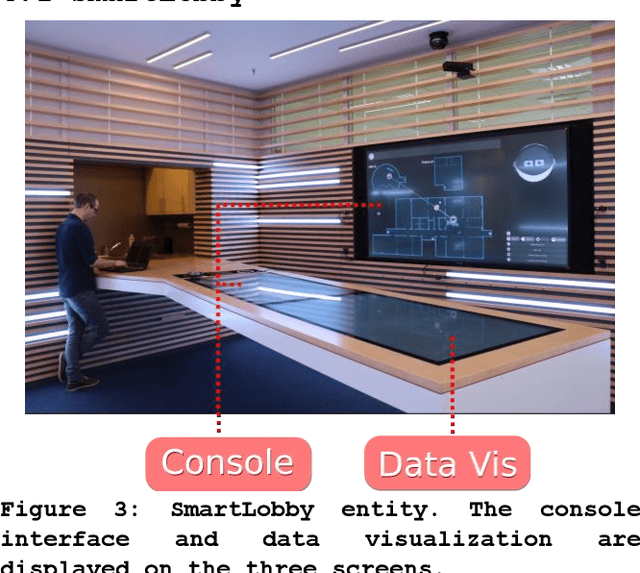
Future intelligent system will involve very various types of artificial agents, such as mobile robots, smart home infrastructure or personal devices, which share data and collaborate with each other to execute certain tasks.Designing an efficient human-machine interface, which can support users to express needs to the system, supervise the collaboration progress of different entities and evaluate the result, will be challengeable. This paper presents the design and implementation of the human-machine interface of Intelligent Cyber-Physical system (ICPS),which is a multi-entity coordination system of robots and other smart devices in a working environment. ICPS gathers sensory data from entities and then receives users' command, then optimizes plans to utilize the capability of different entities to serve people. Using multi-model interaction methods, e.g. graphical interfaces, speech interaction, gestures and facial expressions, ICPS is able to receive inputs from users through different entities, keep users aware of the progress and accomplish the task efficiently
Optimum Reject Options for Prototype-based Classification
Mar 23, 2015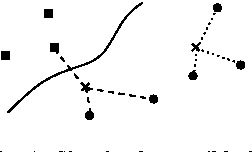
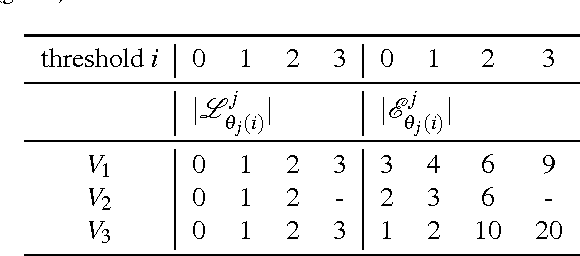
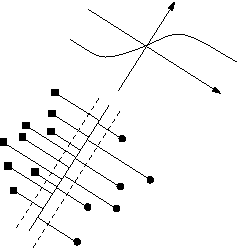
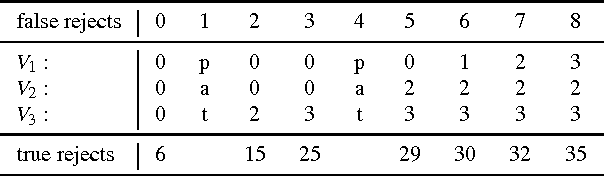
We analyse optimum reject strategies for prototype-based classifiers and real-valued rejection measures, using the distance of a data point to the closest prototype or probabilistic counterparts. We compare reject schemes with global thresholds, and local thresholds for the Voronoi cells of the classifier. For the latter, we develop a polynomial-time algorithm to compute optimum thresholds based on a dynamic programming scheme, and we propose an intuitive linear time, memory efficient approximation thereof with competitive accuracy. Evaluating the performance in various benchmarks, we conclude that local reject options are beneficial in particular for simple prototype-based classifiers, while the improvement is less pronounced for advanced models. For the latter, an accuracy-reject curve which is comparable to support vector machine classifiers with state of the art reject options can be reached.