 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Supervised Autonomous Resection and Retraction Framework for Transurethral Enucleation of the Prostatic Median Lobe
Nov 11, 2025Concentric tube robots (CTRs) offer dexterous motion at millimeter scales, enabling minimally invasive procedures through natural orifices. This work presents a coordinated model-based resection planner and learning-based retraction network that work together to enable semi-autonomous tissue resection using a dual-arm transurethral concentric tube robot (the Virtuoso). The resection planner operates directly on segmented CT volumes of prostate phantoms, automatically generating tool trajectories for a three-phase median lobe resection workflow: left/median trough resection, right/median trough resection, and median blunt dissection. The retraction network, PushCVAE, trained on surgeon demonstrations, generates retractions according to the procedural phase. The procedure is executed under Level-3 (supervised) autonomy on a prostate phantom composed of hydrogel materials that replicate the mechanical and cutting properties of tissue. As a feasibility study, we demonstrate that our combined autonomous system achieves a 97.1% resection of the targeted volume of the median lobe. Our study establishes a foundation for image-guided autonomy in transurethral robotic surgery and represents a first step toward fully automated minimally-invasive prostate enucleation.
Towards Fluorescence-Guided Autonomous Robotic Partial Nephrectomy on Novel Tissue-Mimicking Hydrogel Phantoms
Mar 04, 2025Autonomous robotic systems hold potential for improving renal tumor resection accuracy and patient outcomes. We present a fluorescence-guided robotic system capable of planning and executing incision paths around exophytic renal tumors with a clinically relevant resection margin. Leveraging point cloud observations, the system handles irregular tumor shapes and distinguishes healthy from tumorous tissue based on near-infrared imaging, akin to indocyanine green staining in partial nephrectomy. Tissue-mimicking phantoms are crucial for the development of autonomous robotic surgical systems for interventions where acquiring ex-vivo animal tissue is infeasible, such as cancer of the kidney and renal pelvis. To this end, we propose novel hydrogel-based kidney phantoms with exophytic tumors that mimic the physical and visual behavior of tissue, and are compatible with electrosurgical instruments, a common limitation of silicone-based phantoms. In contrast to previous hydrogel phantoms, we mix the material with near-infrared dye to enable fluorescence-guided tumor segmentation. Autonomous real-world robotic experiments validate our system and phantoms, achieving an average margin accuracy of 1.44 mm in a completion time of 69 sec.
Tracking Tumors under Deformation from Partial Point Clouds using Occupancy Networks
Nov 04, 2024



To track tumors during surgery, information from preoperative CT scans is used to determine their position. However, as the surgeon operates, the tumor may be deformed which presents a major hurdle for accurately resecting the tumor, and can lead to surgical inaccuracy, increased operation time, and excessive margins. This issue is particularly pronounced in robot-assisted partial nephrectomy (RAPN), where the kidney undergoes significant deformations during operation. Toward addressing this, we introduce a occupancy network-based method for the localization of tumors within kidney phantoms undergoing deformations at interactive speeds. We validate our method by introducing a 3D hydrogel kidney phantom embedded with exophytic and endophytic renal tumors. It closely mimics real tissue mechanics to simulate kidney deformation during in vivo surgery, providing excellent contrast and clear delineation of tumor margins to enable automatic threshold-based segmentation. Our findings indicate that the proposed method can localize tumors in moderately deforming kidneys with a margin of 6mm to 10mm, while providing essential volumetric 3D information at over 60Hz. This capability directly enables downstream tasks such as robotic resection.
Shape Manipulation of Bevel-Tip Needles for Prostate Biopsy Procedures: A Comparison of Two Resolved-Rate Controllers
Feb 05, 2024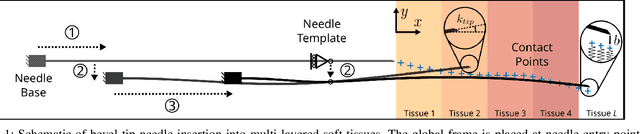
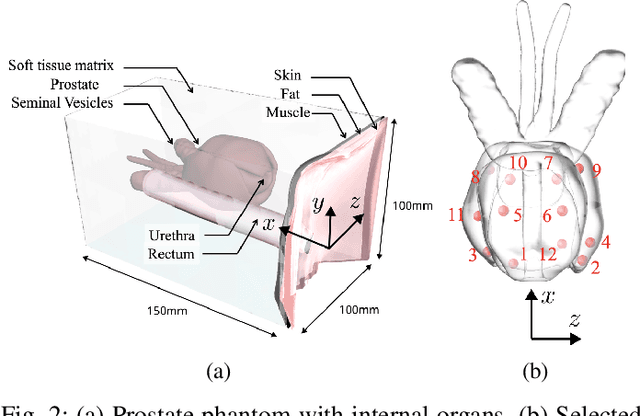
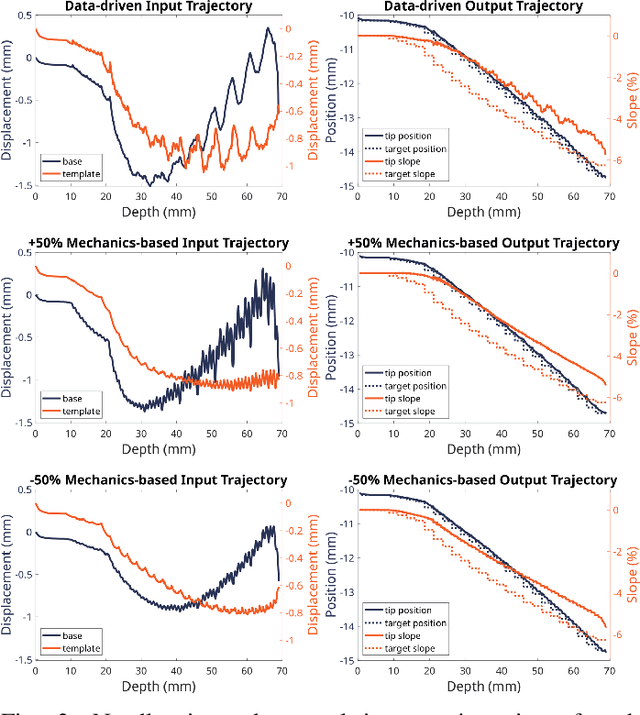

Prostate cancer diagnosis continues to encounter challenges, often due to imprecise needle placement in standard biopsies. Several control strategies have been developed to compensate for needle tip prediction inaccuracies, however none were compared against each other, and it is unclear whether any of them can be safely and universally applied in clinical settings. This paper compares the performance of two resolved-rate controllers, derived from a mechanics-based and a data-driven approach, for bevel-tip needle control using needle shape manipulation through a template. We demonstrate for a simulated 12-core biopsy procedure under model parameter uncertainty that the mechanics-based controller can better reach desired targets when only the final goal configuration is presented even with uncertainty on model parameters estimation, and that providing a feasible needle path is crucial in ensuring safe surgical outcomes when either controller is used for needle shape manipulation.