 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLUDO: Low-Latency Understanding of Highly Deformable Objects using Point Cloud Occupancy Functions
Nov 13, 2024Accurately determining the shape and location of internal structures within deformable objects is crucial for medical tasks that require precise targeting, such as robotic biopsies. We introduce LUDO, a method for accurate low-latency understanding of deformable objects. LUDO reconstructs objects in their deformed state, including their internal structures, from a single-view point cloud observation in under 30 ms using occupancy networks. We demonstrate LUDO's abilities for autonomous targeting of internal regions of interest (ROIs) in highly deformable objects. Additionally, LUDO provides uncertainty estimates and explainability for its predictions, both of which are important in safety-critical applications such as surgical interventions. We evaluate LUDO in real-world robotic experiments, achieving a success rate of 98.9% for puncturing various ROIs inside highly deformable objects. LUDO demonstrates the potential to interact with deformable objects without the need for deformable registration methods.
Tracking Tumors under Deformation from Partial Point Clouds using Occupancy Networks
Nov 04, 2024



To track tumors during surgery, information from preoperative CT scans is used to determine their position. However, as the surgeon operates, the tumor may be deformed which presents a major hurdle for accurately resecting the tumor, and can lead to surgical inaccuracy, increased operation time, and excessive margins. This issue is particularly pronounced in robot-assisted partial nephrectomy (RAPN), where the kidney undergoes significant deformations during operation. Toward addressing this, we introduce a occupancy network-based method for the localization of tumors within kidney phantoms undergoing deformations at interactive speeds. We validate our method by introducing a 3D hydrogel kidney phantom embedded with exophytic and endophytic renal tumors. It closely mimics real tissue mechanics to simulate kidney deformation during in vivo surgery, providing excellent contrast and clear delineation of tumor margins to enable automatic threshold-based segmentation. Our findings indicate that the proposed method can localize tumors in moderately deforming kidneys with a margin of 6mm to 10mm, while providing essential volumetric 3D information at over 60Hz. This capability directly enables downstream tasks such as robotic resection.
LOOC: Localizing Organs using Occupancy Networks and Body Surface Depth Images
Jun 18, 2024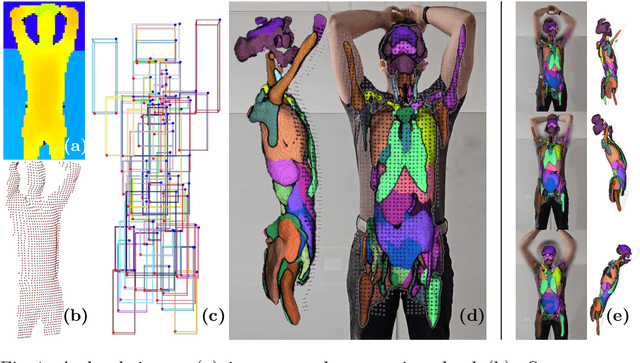
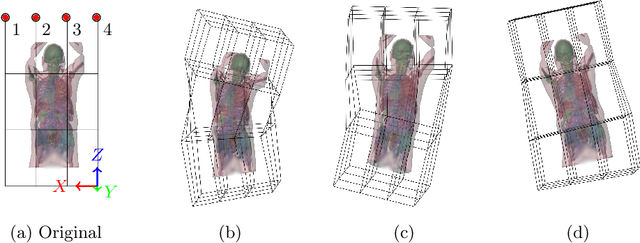
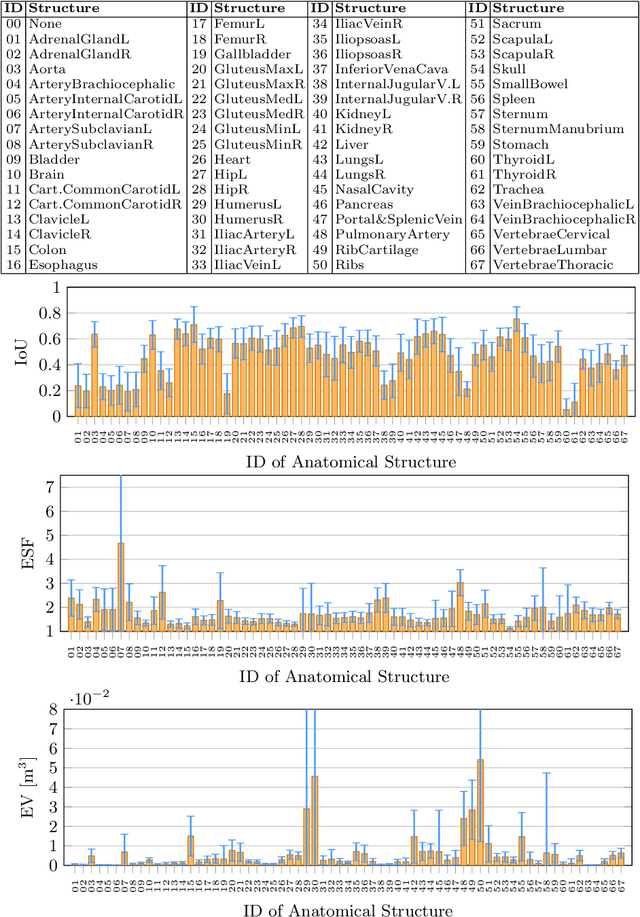
We introduce a novel method employing occupancy networks for the precise localization of 67 anatomical structures from single depth images captured from the exterior of the human body. This method considers the anatomical diversity across individuals. Our contributions include the application of occupancy networks for occluded structure localization, a robust method for estimating anatomical positions from depth images, and the creation of detailed, individualized 3D anatomical atlases. This approach promises improvements in medical imaging and automated diagnostic procedures by offering accurate, non-invasive localization of critical anatomical features.
Registered and Segmented Deformable Object Reconstruction from a Single View Point Cloud
Nov 13, 2023



In deformable object manipulation, we often want to interact with specific segments of an object that are only defined in non-deformed models of the object. We thus require a system that can recognize and locate these segments in sensor data of deformed real world objects. This is normally done using deformable object registration, which is problem specific and complex to tune. Recent methods utilize neural occupancy functions to improve deformable object registration by registering to an object reconstruction. Going one step further, we propose a system that in addition to reconstruction learns segmentation of the reconstructed object. As the resulting output already contains the information about the segments, we can skip the registration process. Tested on a variety of deformable objects in simulation and the real world, we demonstrate that our method learns to robustly find these segments. We also introduce a simple sampling algorithm to generate better training data for occupancy learning.