 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimally Invasive Flexible Needle Manipulation Based on Finite Element Simulation and Cross Entropy Method
Nov 12, 2024



We present a novel approach for minimally invasive flexible needle manipulations by pairing a real-time finite element simulator with the cross-entropy method. Additionally, we demonstrate how a kinematic-driven bang-bang controller can complement the control framework for better tracking performance. We show how electromagnetic (EM) tracking can be readily incorporated into the framework to provide controller feedback. Tissue phantom experiment with EM tracking shows the average targeting error is $0.16 \pm 0.29mm$.
Shape Manipulation of Bevel-Tip Needles for Prostate Biopsy Procedures: A Comparison of Two Resolved-Rate Controllers
Feb 05, 2024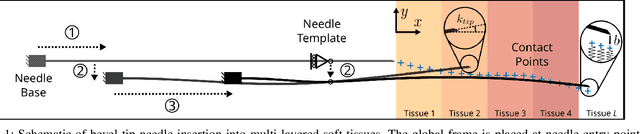
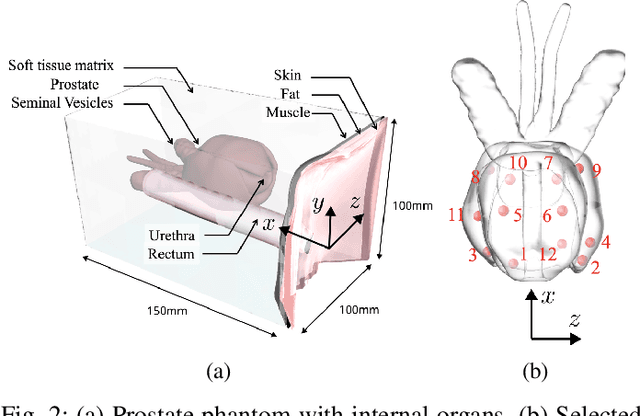
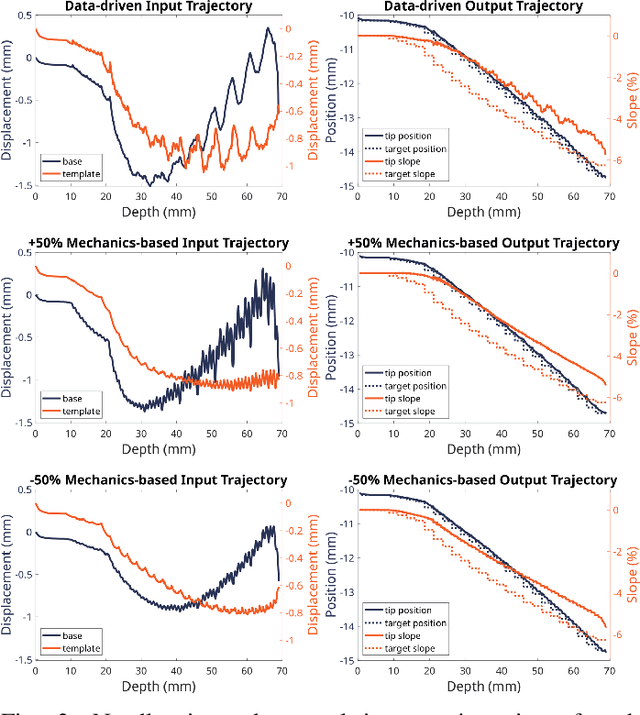

Prostate cancer diagnosis continues to encounter challenges, often due to imprecise needle placement in standard biopsies. Several control strategies have been developed to compensate for needle tip prediction inaccuracies, however none were compared against each other, and it is unclear whether any of them can be safely and universally applied in clinical settings. This paper compares the performance of two resolved-rate controllers, derived from a mechanics-based and a data-driven approach, for bevel-tip needle control using needle shape manipulation through a template. We demonstrate for a simulated 12-core biopsy procedure under model parameter uncertainty that the mechanics-based controller can better reach desired targets when only the final goal configuration is presented even with uncertainty on model parameters estimation, and that providing a feasible needle path is crucial in ensuring safe surgical outcomes when either controller is used for needle shape manipulation.
Bevel-Tip Needle Deflection Modeling, Simulation, and Validation in Multi-Layer Tissues
Nov 29, 2023

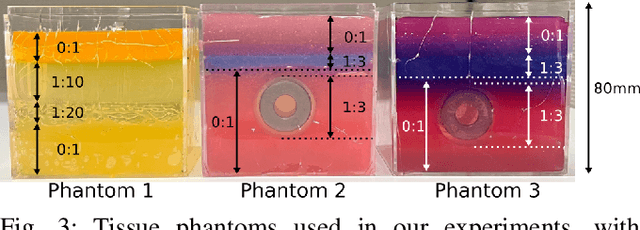
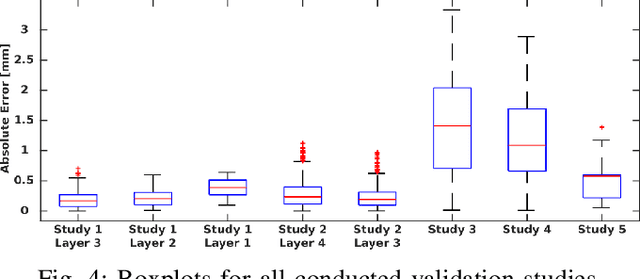
Percutaneous needle insertions are commonly performed for diagnostic and therapeutic purposes as an effective alternative to more invasive surgical procedures. However, the outcome of needle-based approaches relies heavily on the accuracy of needle placement, which remains a challenge even with robot assistance and medical imaging guidance due to needle deflection caused by contact with soft tissues. In this paper, we present a novel mechanics-based 2D bevel-tip needle model that can account for the effect of nonlinear strain-dependent behavior of biological soft tissues under compression. Real-time finite element simulation allows multiple control inputs along the length of the needle with full three-degree-of-freedom (DOF) planar needle motions. Cross-validation studies using custom-designed multi-layer tissue phantoms as well as heterogeneous chicken breast tissues result in less than 1mm in-plane errors for insertions reaching depths of up to 61 mm, demonstrating the validity and generalizability of the proposed method.