 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBevel-Tip Needle Deflection Modeling, Simulation, and Validation in Multi-Layer Tissues
Nov 29, 2023

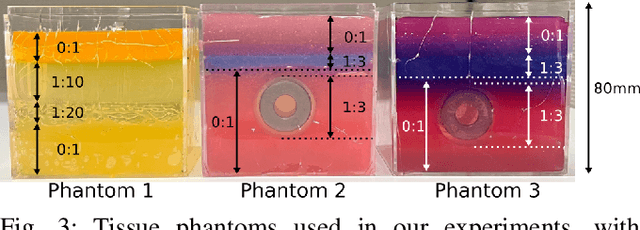
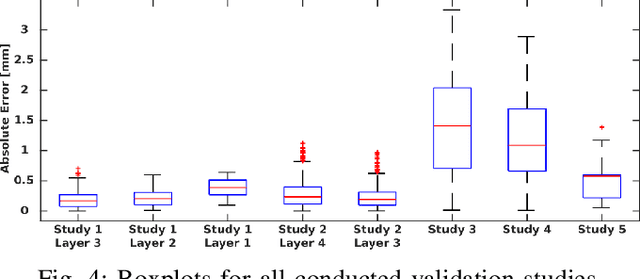
Percutaneous needle insertions are commonly performed for diagnostic and therapeutic purposes as an effective alternative to more invasive surgical procedures. However, the outcome of needle-based approaches relies heavily on the accuracy of needle placement, which remains a challenge even with robot assistance and medical imaging guidance due to needle deflection caused by contact with soft tissues. In this paper, we present a novel mechanics-based 2D bevel-tip needle model that can account for the effect of nonlinear strain-dependent behavior of biological soft tissues under compression. Real-time finite element simulation allows multiple control inputs along the length of the needle with full three-degree-of-freedom (DOF) planar needle motions. Cross-validation studies using custom-designed multi-layer tissue phantoms as well as heterogeneous chicken breast tissues result in less than 1mm in-plane errors for insertions reaching depths of up to 61 mm, demonstrating the validity and generalizability of the proposed method.