 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimally Invasive Flexible Needle Manipulation Based on Finite Element Simulation and Cross Entropy Method
Nov 12, 2024



We present a novel approach for minimally invasive flexible needle manipulations by pairing a real-time finite element simulator with the cross-entropy method. Additionally, we demonstrate how a kinematic-driven bang-bang controller can complement the control framework for better tracking performance. We show how electromagnetic (EM) tracking can be readily incorporated into the framework to provide controller feedback. Tissue phantom experiment with EM tracking shows the average targeting error is $0.16 \pm 0.29mm$.
Automating proton PBS treatment planning for head and neck cancers using policy gradient-based deep reinforcement learning
Sep 17, 2024

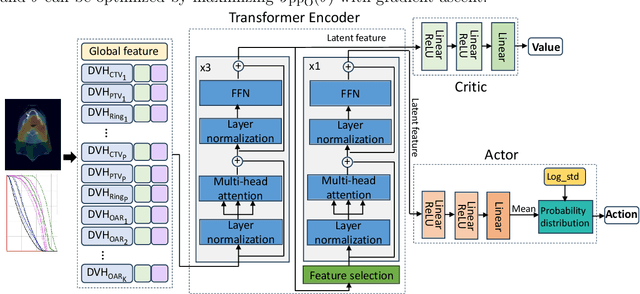

Proton pencil beam scanning (PBS) treatment planning for head and neck (H&N) cancers is a time-consuming and experience-demanding task where a large number of planning objectives are involved. Deep reinforcement learning (DRL) has recently been introduced to the planning processes of intensity-modulated radiation therapy and brachytherapy for prostate, lung, and cervical cancers. However, existing approaches are built upon the Q-learning framework and weighted linear combinations of clinical metrics, suffering from poor scalability and flexibility and only capable of adjusting a limited number of planning objectives in discrete action spaces. We propose an automatic treatment planning model using the proximal policy optimization (PPO) algorithm and a dose distribution-based reward function for proton PBS treatment planning of H&N cancers. Specifically, a set of empirical rules is used to create auxiliary planning structures from target volumes and organs-at-risk (OARs), along with their associated planning objectives. These planning objectives are fed into an in-house optimization engine to generate the spot monitor unit (MU) values. A decision-making policy network trained using PPO is developed to iteratively adjust the involved planning objective parameters in a continuous action space and refine the PBS treatment plans using a novel dose distribution-based reward function. Proton H&N treatment plans generated by the model show improved OAR sparing with equal or superior target coverage when compared with human-generated plans. Moreover, additional experiments on liver cancer demonstrate that the proposed method can be successfully generalized to other treatment sites. To the best of our knowledge, this is the first DRL-based automatic treatment planning model capable of achieving human-level performance for H&N cancers.