 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Supervised Autonomous Resection and Retraction Framework for Transurethral Enucleation of the Prostatic Median Lobe
Nov 11, 2025Concentric tube robots (CTRs) offer dexterous motion at millimeter scales, enabling minimally invasive procedures through natural orifices. This work presents a coordinated model-based resection planner and learning-based retraction network that work together to enable semi-autonomous tissue resection using a dual-arm transurethral concentric tube robot (the Virtuoso). The resection planner operates directly on segmented CT volumes of prostate phantoms, automatically generating tool trajectories for a three-phase median lobe resection workflow: left/median trough resection, right/median trough resection, and median blunt dissection. The retraction network, PushCVAE, trained on surgeon demonstrations, generates retractions according to the procedural phase. The procedure is executed under Level-3 (supervised) autonomy on a prostate phantom composed of hydrogel materials that replicate the mechanical and cutting properties of tissue. As a feasibility study, we demonstrate that our combined autonomous system achieves a 97.1% resection of the targeted volume of the median lobe. Our study establishes a foundation for image-guided autonomy in transurethral robotic surgery and represents a first step toward fully automated minimally-invasive prostate enucleation.
Shape Manipulation of Bevel-Tip Needles for Prostate Biopsy Procedures: A Comparison of Two Resolved-Rate Controllers
Feb 05, 2024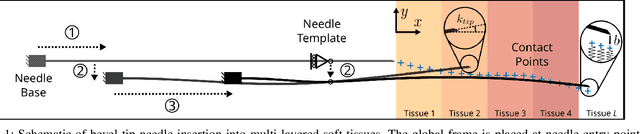
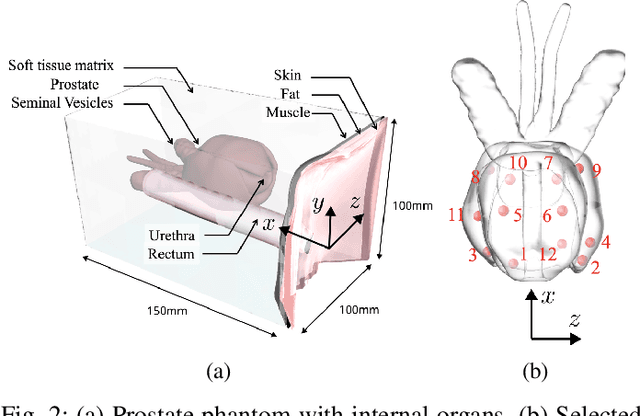
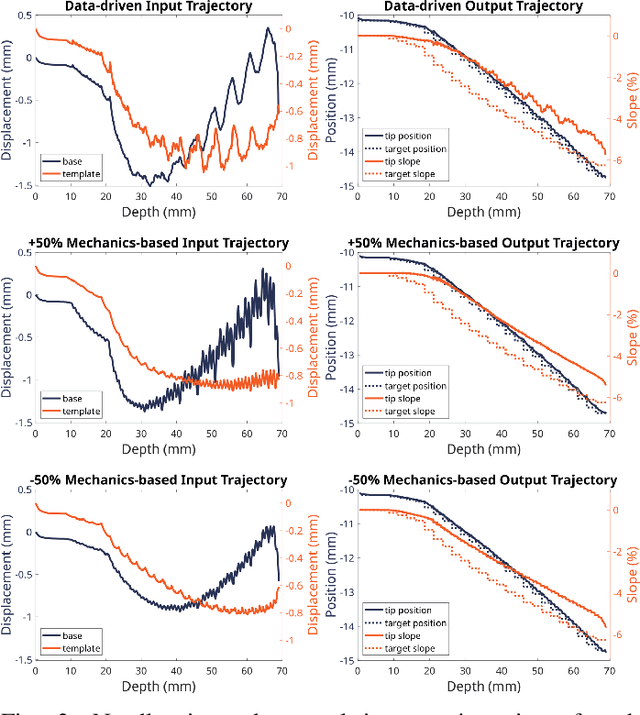

Prostate cancer diagnosis continues to encounter challenges, often due to imprecise needle placement in standard biopsies. Several control strategies have been developed to compensate for needle tip prediction inaccuracies, however none were compared against each other, and it is unclear whether any of them can be safely and universally applied in clinical settings. This paper compares the performance of two resolved-rate controllers, derived from a mechanics-based and a data-driven approach, for bevel-tip needle control using needle shape manipulation through a template. We demonstrate for a simulated 12-core biopsy procedure under model parameter uncertainty that the mechanics-based controller can better reach desired targets when only the final goal configuration is presented even with uncertainty on model parameters estimation, and that providing a feasible needle path is crucial in ensuring safe surgical outcomes when either controller is used for needle shape manipulation.
Eye Tracking for Tele-robotic Surgery: A Comparative Evaluation of Head-worn Solutions
Oct 18, 2023Purpose: Metrics derived from eye-gaze-tracking and pupillometry show promise for cognitive load assessment, potentially enhancing training and patient safety through user-specific feedback in tele-robotic surgery. However, current eye-tracking solutions' effectiveness in tele-robotic surgery is uncertain compared to everyday situations due to close-range interactions causing extreme pupil angles and occlusions. To assess the effectiveness of modern eye-gaze-tracking solutions in tele-robotic surgery, we compare the Tobii Pro 3 Glasses and Pupil Labs Core, evaluating their pupil diameter and gaze stability when integrated with the da Vinci Research Kit (dVRK). Methods: The study protocol includes a nine-point gaze calibration followed by pick-and-place task using the dVRK and is repeated three times. After a final calibration, users view a 3x3 grid of AprilTags, focusing on each marker for 10 seconds, to evaluate gaze stability across dVRK-screen positions with the L2-norm. Different gaze calibrations assess calibration's temporal deterioration due to head movements. Pupil diameter stability is evaluated using the FFT from the pupil diameter during the pick-and-place tasks. Users perform this routine with both head-worn eye-tracking systems. Results: Data collected from ten users indicate comparable pupil diameter stability. FFTs of pupil diameters show similar amplitudes in high-frequency components. Tobii Glasses show more temporal gaze stability compared to Pupil Labs, though both eye trackers yield a similar 4cm error in gaze estimation without an outdated calibration. Conclusion: Both eye trackers demonstrate similar stability of the pupil diameter and gaze, when the calibration is not outdated, indicating comparable eye-tracking and pupillometry performance in tele-robotic surgery settings.