 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInstance-Level Semantic Maps for Vision Language Navigation
May 23, 2023



Humans have a natural ability to perform semantic associations with the surrounding objects in the environment. This allows them to create a mental map of the environment which helps them to navigate on-demand when given a linguistic instruction. A natural goal in Vision Language Navigation (VLN) research is to impart autonomous agents with similar capabilities. Recently introduced VL Maps \cite{huang23vlmaps} take a step towards this goal by creating a semantic spatial map representation of the environment without any labelled data. However, their representations are limited for practical applicability as they do not distinguish between different instances of the same object. In this work, we address this limitation by integrating instance-level information into spatial map representation using a community detection algorithm and by utilizing word ontology learned by large language models (LLMs) to perform open-set semantic associations in the mapping representation. The resulting map representation improves the navigation performance by two-fold (233\%) on realistic language commands with instance-specific descriptions compared to VL Maps. We validate the practicality and effectiveness of our approach through extensive qualitative and quantitative experiments.
$f$-Cal: Calibrated aleatoric uncertainty estimation from neural networks for robot perception
Sep 28, 2021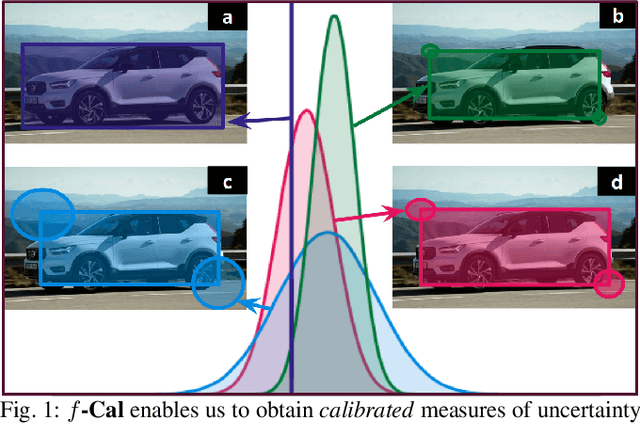
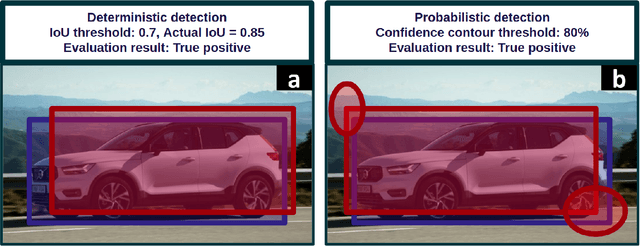
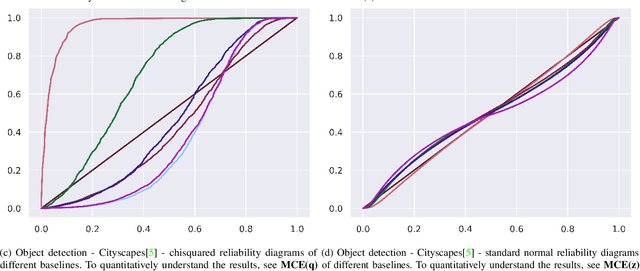
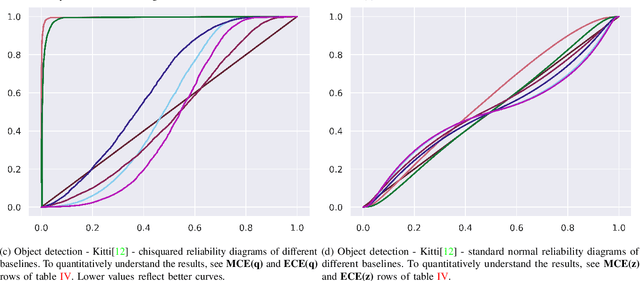
While modern deep neural networks are performant perception modules, performance (accuracy) alone is insufficient, particularly for safety-critical robotic applications such as self-driving vehicles. Robot autonomy stacks also require these otherwise blackbox models to produce reliable and calibrated measures of confidence on their predictions. Existing approaches estimate uncertainty from these neural network perception stacks by modifying network architectures, inference procedure, or loss functions. However, in general, these methods lack calibration, meaning that the predictive uncertainties do not faithfully represent the true underlying uncertainties (process noise). Our key insight is that calibration is only achieved by imposing constraints across multiple examples, such as those in a mini-batch; as opposed to existing approaches which only impose constraints per-sample, often leading to overconfident (thus miscalibrated) uncertainty estimates. By enforcing the distribution of outputs of a neural network to resemble a target distribution by minimizing an $f$-divergence, we obtain significantly better-calibrated models compared to prior approaches. Our approach, $f$-Cal, outperforms existing uncertainty calibration approaches on robot perception tasks such as object detection and monocular depth estimation over multiple real-world benchmarks.
Deep Active Localization
Mar 05, 2019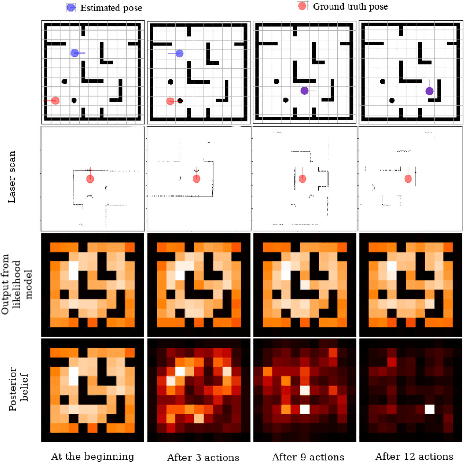
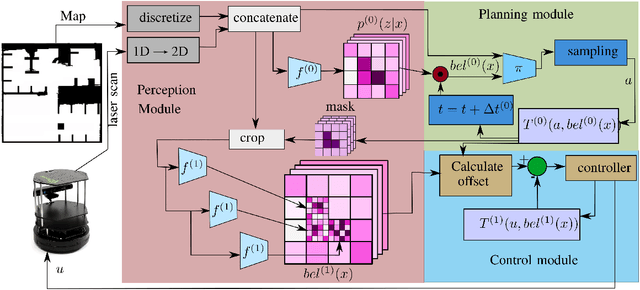
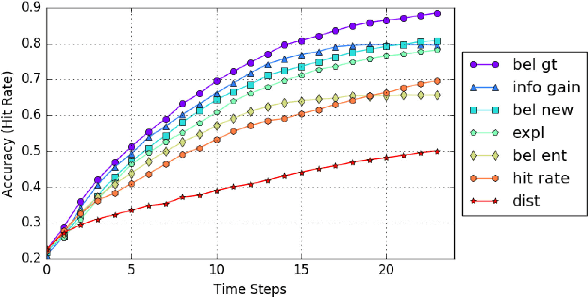
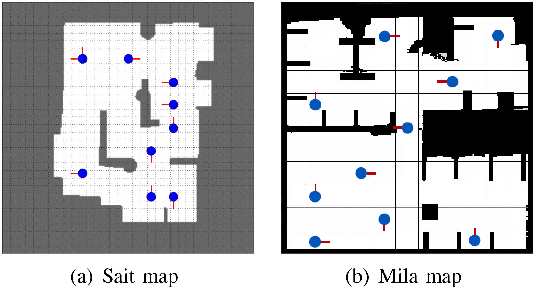
Active localization is the problem of generating robot actions that allow it to maximally disambiguate its pose within a reference map. Traditional approaches to this use an information-theoretic criterion for action selection and hand-crafted perceptual models. In this work we propose an end-to-end differentiable method for learning to take informative actions that is trainable entirely in simulation and then transferable to real robot hardware with zero refinement. The system is composed of two modules: a convolutional neural network for perception, and a deep reinforcement learned planning module. We introduce a multi-scale approach to the learned perceptual model since the accuracy needed to perform action selection with reinforcement learning is much less than the accuracy needed for robot control. We demonstrate that the resulting system outperforms using the traditional approach for either perception or planning. We also demonstrate our approaches robustness to different map configurations and other nuisance parameters through the use of domain randomization in training. The code is also compatible with the OpenAI gym framework, as well as the Gazebo simulator.