 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffPrompter: Differentiable Implicit Visual Prompts for Semantic-Segmentation in Adverse Conditions
Oct 06, 2023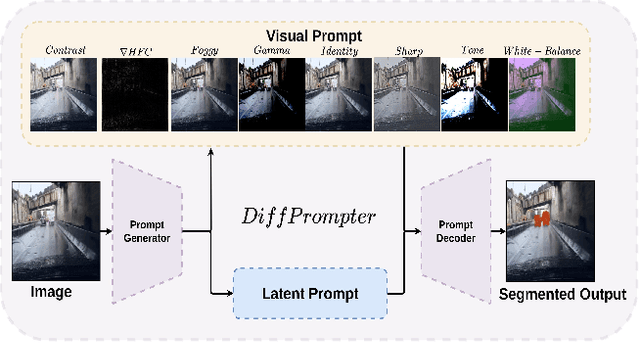



Semantic segmentation in adverse weather scenarios is a critical task for autonomous driving systems. While foundation models have shown promise, the need for specialized adaptors becomes evident for handling more challenging scenarios. We introduce DiffPrompter, a novel differentiable visual and latent prompting mechanism aimed at expanding the learning capabilities of existing adaptors in foundation models. Our proposed $\nabla$HFC image processing block excels particularly in adverse weather conditions, where conventional methods often fall short. Furthermore, we investigate the advantages of jointly training visual and latent prompts, demonstrating that this combined approach significantly enhances performance in out-of-distribution scenarios. Our differentiable visual prompts leverage parallel and series architectures to generate prompts, effectively improving object segmentation tasks in adverse conditions. Through a comprehensive series of experiments and evaluations, we provide empirical evidence to support the efficacy of our approach. Project page at https://diffprompter.github.io.
Instance-Level Semantic Maps for Vision Language Navigation
May 23, 2023Humans have a natural ability to perform semantic associations with the surrounding objects in the environment. This allows them to create a mental map of the environment which helps them to navigate on-demand when given a linguistic instruction. A natural goal in Vision Language Navigation (VLN) research is to impart autonomous agents with similar capabilities. Recently introduced VL Maps \cite{huang23vlmaps} take a step towards this goal by creating a semantic spatial map representation of the environment without any labelled data. However, their representations are limited for practical applicability as they do not distinguish between different instances of the same object. In this work, we address this limitation by integrating instance-level information into spatial map representation using a community detection algorithm and by utilizing word ontology learned by large language models (LLMs) to perform open-set semantic associations in the mapping representation. The resulting map representation improves the navigation performance by two-fold (233\%) on realistic language commands with instance-specific descriptions compared to VL Maps. We validate the practicality and effectiveness of our approach through extensive qualitative and quantitative experiments.