 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage2Garment: Simulation-ready Garment Generation from a Single Image
Jan 15, 2026Estimating physically accurate, simulation-ready garments from a single image is challenging due to the absence of image-to-physics datasets and the ill-posed nature of this problem. Prior methods either require multi-view capture and expensive differentiable simulation or predict only garment geometry without the material properties required for realistic simulation. We propose a feed-forward framework that sidesteps these limitations by first fine-tuning a vision-language model to infer material composition and fabric attributes from real images, and then training a lightweight predictor that maps these attributes to the corresponding physical fabric parameters using a small dataset of material-physics measurements. Our approach introduces two new datasets (FTAG and T2P) and delivers simulation-ready garments from a single image without iterative optimization. Experiments show that our estimator achieves superior accuracy in material composition estimation and fabric attribute prediction, and by passing them through our physics parameter estimator, we further achieve higher-fidelity simulations compared to state-of-the-art image-to-garment methods.
Towards Vision-Language-Garment Models For Web Knowledge Garment Understanding and Generation
Jun 05, 2025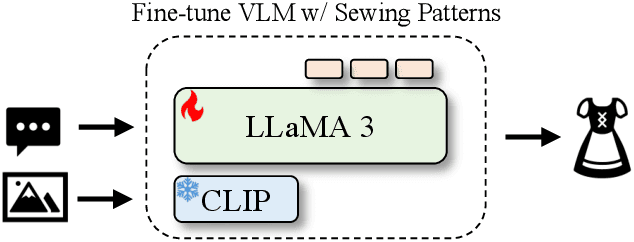
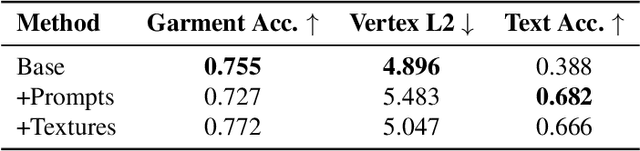
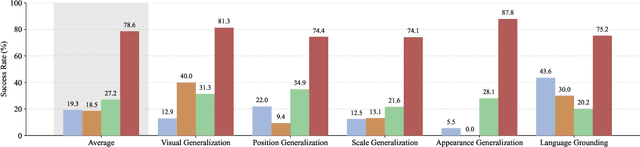
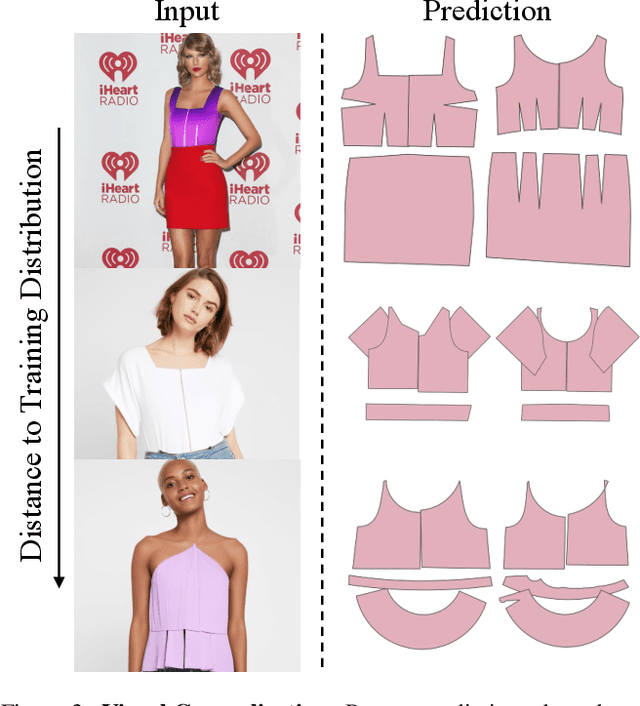
Multimodal foundation models have demonstrated strong generalization, yet their ability to transfer knowledge to specialized domains such as garment generation remains underexplored. We introduce VLG, a vision-language-garment model that synthesizes garments from textual descriptions and visual imagery. Our experiments assess VLG's zero-shot generalization, investigating its ability to transfer web-scale reasoning to unseen garment styles and prompts. Preliminary results indicate promising transfer capabilities, highlighting the potential for multimodal foundation models to adapt effectively to specialized domains like fashion design.
RBench-V: A Primary Assessment for Visual Reasoning Models with Multi-modal Outputs
May 22, 2025The rapid advancement of native multi-modal models and omni-models, exemplified by GPT-4o, Gemini, and o3, with their capability to process and generate content across modalities such as text and images, marks a significant milestone in the evolution of intelligence. Systematic evaluation of their multi-modal output capabilities in visual thinking processes (also known as multi-modal chain of thought, M-CoT) becomes critically important. However, existing benchmarks for evaluating multi-modal models primarily focus on assessing multi-modal inputs and text-only reasoning while neglecting the importance of reasoning through multi-modal outputs. In this paper, we present a benchmark, dubbed RBench-V, designed to assess models' vision-indispensable reasoning abilities. To construct RBench-V, we carefully hand-pick 803 questions covering math, physics, counting, and games. Unlike previous benchmarks that typically specify certain input modalities, RBench-V presents problems centered on multi-modal outputs, which require image manipulation such as generating novel images and constructing auxiliary lines to support the reasoning process. We evaluate numerous open- and closed-source models on RBench-V, including o3, Gemini 2.5 Pro, Qwen2.5-VL, etc. Even the best-performing model, o3, achieves only 25.8% accuracy on RBench-V, far below the human score of 82.3%, highlighting that current models struggle to leverage multi-modal reasoning. Data and code are available at https://evalmodels.github.io/rbenchv
R-Bench: Graduate-level Multi-disciplinary Benchmarks for LLM & MLLM Complex Reasoning Evaluation
May 04, 2025Reasoning stands as a cornerstone of intelligence, enabling the synthesis of existing knowledge to solve complex problems. Despite remarkable progress, existing reasoning benchmarks often fail to rigorously evaluate the nuanced reasoning capabilities required for complex, real-world problemsolving, particularly in multi-disciplinary and multimodal contexts. In this paper, we introduce a graduate-level, multi-disciplinary, EnglishChinese benchmark, dubbed as Reasoning Bench (R-Bench), for assessing the reasoning capability of both language and multimodal models. RBench spans 1,094 questions across 108 subjects for language model evaluation and 665 questions across 83 subjects for multimodal model testing in both English and Chinese. These questions are meticulously curated to ensure rigorous difficulty calibration, subject balance, and crosslinguistic alignment, enabling the assessment to be an Olympiad-level multi-disciplinary benchmark. We evaluate widely used models, including OpenAI o1, GPT-4o, DeepSeek-R1, etc. Experimental results indicate that advanced models perform poorly on complex reasoning, especially multimodal reasoning. Even the top-performing model OpenAI o1 achieves only 53.2% accuracy on our multimodal evaluation. Data and code are made publicly available at here.
AIpparel: A Large Multimodal Generative Model for Digital Garments
Dec 05, 2024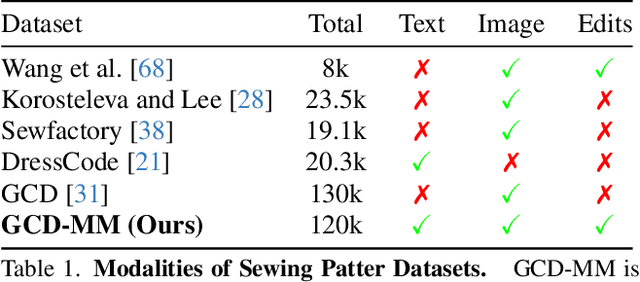
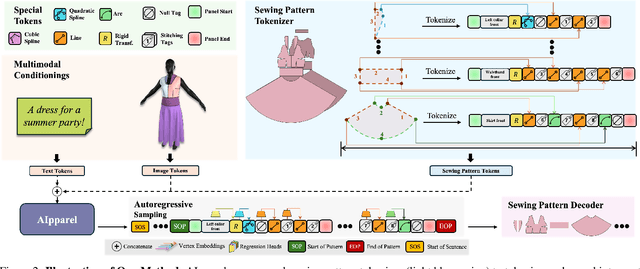

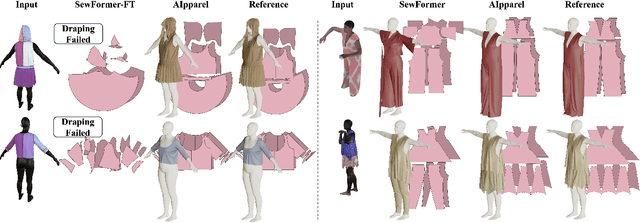
Apparel is essential to human life, offering protection, mirroring cultural identities, and showcasing personal style. Yet, the creation of garments remains a time-consuming process, largely due to the manual work involved in designing them. To simplify this process, we introduce AIpparel, a large multimodal model for generating and editing sewing patterns. Our model fine-tunes state-of-the-art large multimodal models (LMMs) on a custom-curated large-scale dataset of over 120,000 unique garments, each with multimodal annotations including text, images, and sewing patterns. Additionally, we propose a novel tokenization scheme that concisely encodes these complex sewing patterns so that LLMs can learn to predict them efficiently. \methodname achieves state-of-the-art performance in single-modal tasks, including text-to-garment and image-to-garment prediction, and enables novel multimodal garment generation applications such as interactive garment editing. The project website is at georgenakayama.github.io/AIpparel/.
ProvNeRF: Modeling per Point Provenance in NeRFs as a Stochastic Process
Jan 18, 2024Neural radiance fields (NeRFs) have gained popularity across various applications. However, they face challenges in the sparse view setting, lacking sufficient constraints from volume rendering. Reconstructing and understanding a 3D scene from sparse and unconstrained cameras is a long-standing problem in classical computer vision with diverse applications. While recent works have explored NeRFs in sparse, unconstrained view scenarios, their focus has been primarily on enhancing reconstruction and novel view synthesis. Our approach takes a broader perspective by posing the question: "from where has each point been seen?" -- which gates how well we can understand and reconstruct it. In other words, we aim to determine the origin or provenance of each 3D point and its associated information under sparse, unconstrained views. We introduce ProvNeRF, a model that enriches a traditional NeRF representation by incorporating per-point provenance, modeling likely source locations for each point. We achieve this by extending implicit maximum likelihood estimation (IMLE) for stochastic processes. Notably, our method is compatible with any pre-trained NeRF model and the associated training camera poses. We demonstrate that modeling per-point provenance offers several advantages, including uncertainty estimation, criteria-based view selection, and improved novel view synthesis, compared to state-of-the-art methods. Please visit our project page at https://provnerf.github.io
NeRF Revisited: Fixing Quadrature Instability in Volume Rendering
Oct 31, 2023



Neural radiance fields (NeRF) rely on volume rendering to synthesize novel views. Volume rendering requires evaluating an integral along each ray, which is numerically approximated with a finite sum that corresponds to the exact integral along the ray under piecewise constant volume density. As a consequence, the rendered result is unstable w.r.t. the choice of samples along the ray, a phenomenon that we dub quadrature instability. We propose a mathematically principled solution by reformulating the sample-based rendering equation so that it corresponds to the exact integral under piecewise linear volume density. This simultaneously resolves multiple issues: conflicts between samples along different rays, imprecise hierarchical sampling, and non-differentiability of quantiles of ray termination distances w.r.t. model parameters. We demonstrate several benefits over the classical sample-based rendering equation, such as sharper textures, better geometric reconstruction, and stronger depth supervision. Our proposed formulation can be also be used as a drop-in replacement to the volume rendering equation of existing NeRF-based methods. Our project page can be found at pl-nerf.github.io.
DiffFacto: Controllable Part-Based 3D Point Cloud Generation with Cross Diffusion
May 04, 2023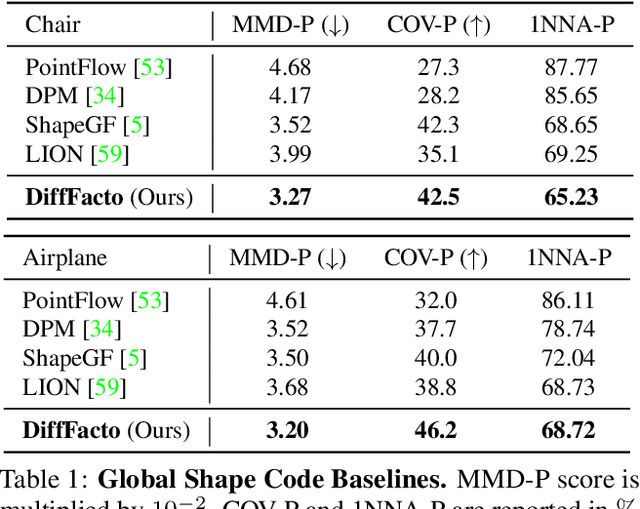
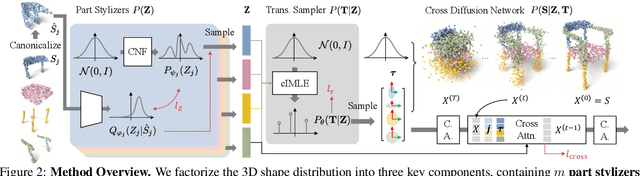
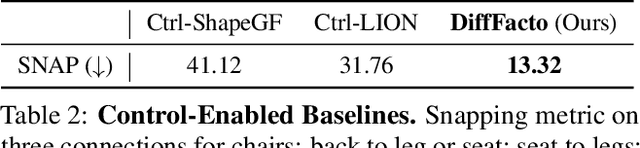
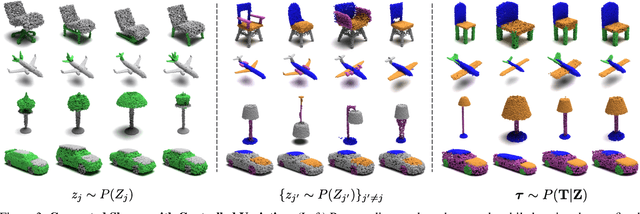
While the community of 3D point cloud generation has witnessed a big growth in recent years, there still lacks an effective way to enable intuitive user control in the generation process, hence limiting the general utility of such methods. Since an intuitive way of decomposing a shape is through its parts, we propose to tackle the task of controllable part-based point cloud generation. We introduce DiffFacto, a novel probabilistic generative model that learns the distribution of shapes with part-level control. We propose a factorization that models independent part style and part configuration distributions and presents a novel cross-diffusion network that enables us to generate coherent and plausible shapes under our proposed factorization. Experiments show that our method is able to generate novel shapes with multiple axes of control. It achieves state-of-the-art part-level generation quality and generates plausible and coherent shapes while enabling various downstream editing applications such as shape interpolation, mixing, and transformation editing. Project website: https://difffacto.github.io/