 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffFacto: Controllable Part-Based 3D Point Cloud Generation with Cross Diffusion
May 04, 2023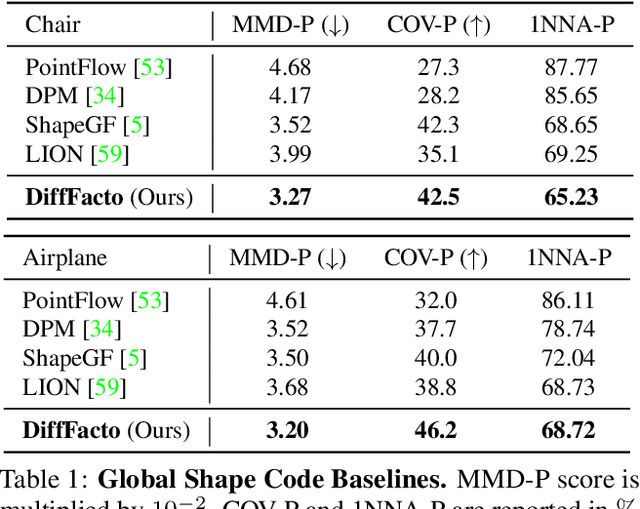
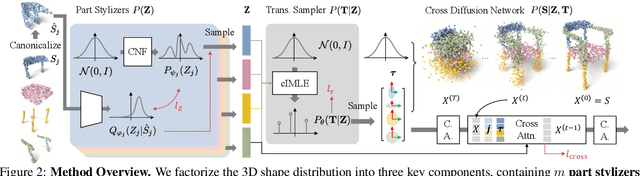
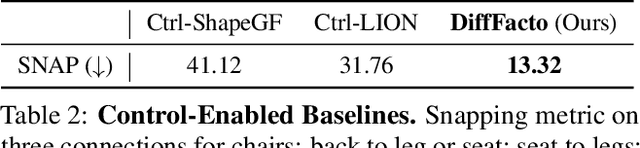
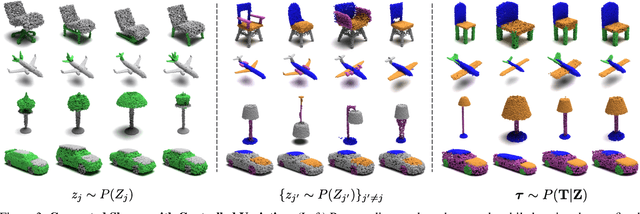
While the community of 3D point cloud generation has witnessed a big growth in recent years, there still lacks an effective way to enable intuitive user control in the generation process, hence limiting the general utility of such methods. Since an intuitive way of decomposing a shape is through its parts, we propose to tackle the task of controllable part-based point cloud generation. We introduce DiffFacto, a novel probabilistic generative model that learns the distribution of shapes with part-level control. We propose a factorization that models independent part style and part configuration distributions and presents a novel cross-diffusion network that enables us to generate coherent and plausible shapes under our proposed factorization. Experiments show that our method is able to generate novel shapes with multiple axes of control. It achieves state-of-the-art part-level generation quality and generates plausible and coherent shapes while enabling various downstream editing applications such as shape interpolation, mixing, and transformation editing. Project website: https://difffacto.github.io/
SpOT: Spatiotemporal Modeling for 3D Object Tracking
Jul 12, 2022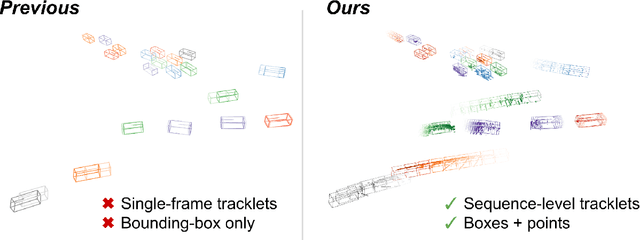
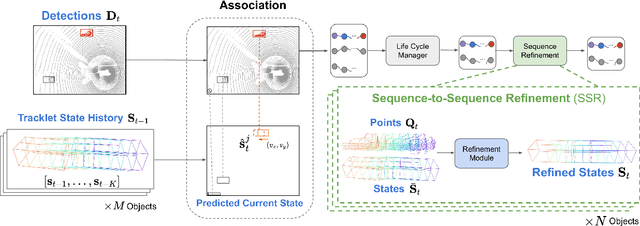
3D multi-object tracking aims to uniquely and consistently identify all mobile entities through time. Despite the rich spatiotemporal information available in this setting, current 3D tracking methods primarily rely on abstracted information and limited history, e.g. single-frame object bounding boxes. In this work, we develop a holistic representation of traffic scenes that leverages both spatial and temporal information of the actors in the scene. Specifically, we reformulate tracking as a spatiotemporal problem by representing tracked objects as sequences of time-stamped points and bounding boxes over a long temporal history. At each timestamp, we improve the location and motion estimates of our tracked objects through learned refinement over the full sequence of object history. By considering time and space jointly, our representation naturally encodes fundamental physical priors such as object permanence and consistency across time. Our spatiotemporal tracking framework achieves state-of-the-art performance on the Waymo and nuScenes benchmarks.