 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnveiling the Significance of Toddler-Inspired Reward Transition in Goal-Oriented Reinforcement Learning
Mar 18, 2024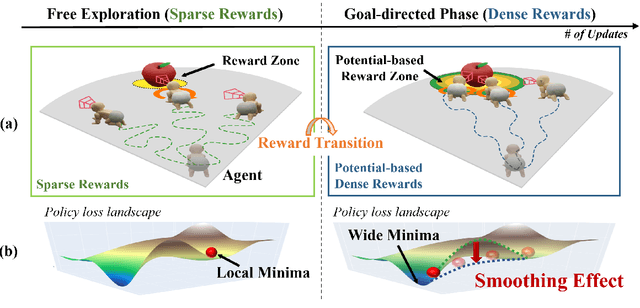

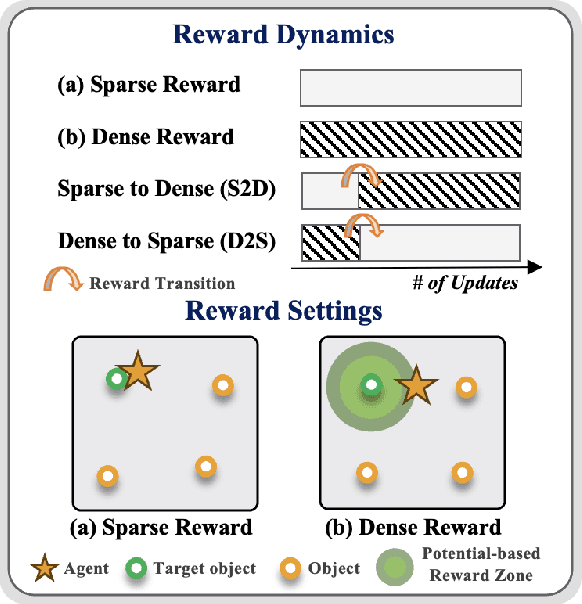
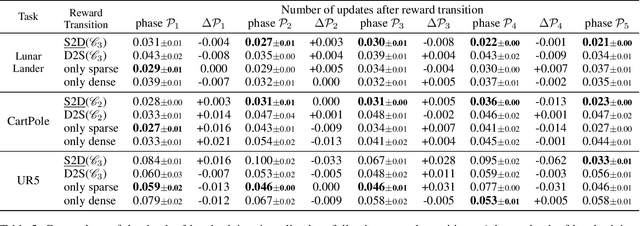
Toddlers evolve from free exploration with sparse feedback to exploiting prior experiences for goal-directed learning with denser rewards. Drawing inspiration from this Toddler-Inspired Reward Transition, we set out to explore the implications of varying reward transitions when incorporated into Reinforcement Learning (RL) tasks. Central to our inquiry is the transition from sparse to potential-based dense rewards, which share optimal strategies regardless of reward changes. Through various experiments, including those in egocentric navigation and robotic arm manipulation tasks, we found that proper reward transitions significantly influence sample efficiency and success rates. Of particular note is the efficacy of the toddler-inspired Sparse-to-Dense (S2D) transition. Beyond these performance metrics, using Cross-Density Visualizer technique, we observed that transitions, especially the S2D, smooth the policy loss landscape, promoting wide minima that enhance generalization in RL models.
Visual Hindsight Self-Imitation Learning for Interactive Navigation
Dec 05, 2023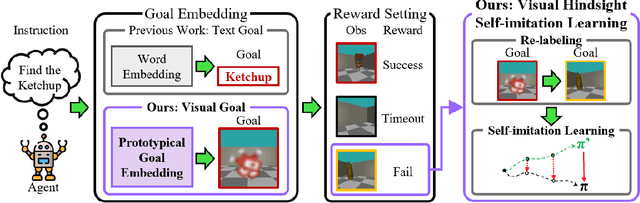
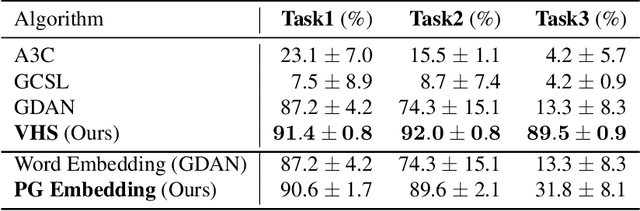
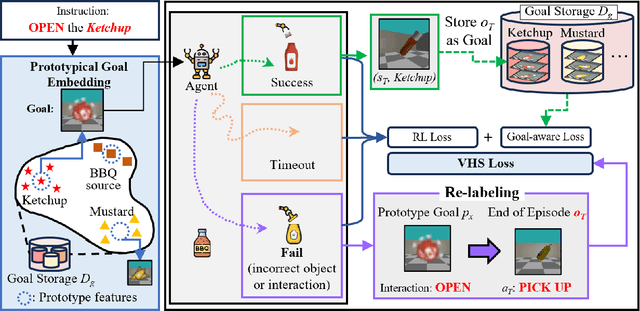
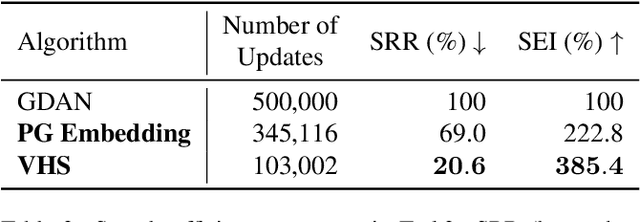
Interactive visual navigation tasks, which involve following instructions to reach and interact with specific targets, are challenging not only because successful experiences are very rare but also because the complex visual inputs require a substantial number of samples. Previous methods for these tasks often rely on intricately designed dense rewards or the use of expensive expert data for imitation learning. To tackle these challenges, we propose a novel approach, Visual Hindsight Self-Imitation Learning (VHS) for enhancing sample efficiency through hindsight goal re-labeling and self-imitation. We also introduce a prototypical goal embedding method derived from experienced goal observations, that is particularly effective in vision-based and partially observable environments. This embedding technique allows the agent to visually reinterpret its unsuccessful attempts, enabling vision-based goal re-labeling and self-imitation from enhanced successful experiences. Experimental results show that VHS outperforms existing techniques in interactive visual navigation tasks, confirming its superior performance and sample efficiency.
CAST: Cluster-Aware Self-Training for Tabular Data
Oct 10, 2023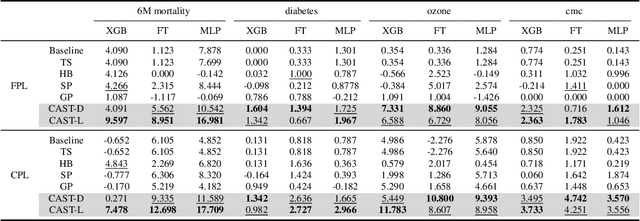
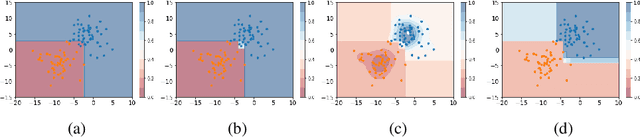
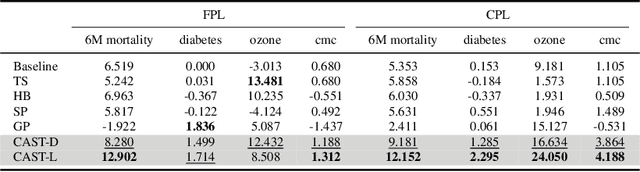
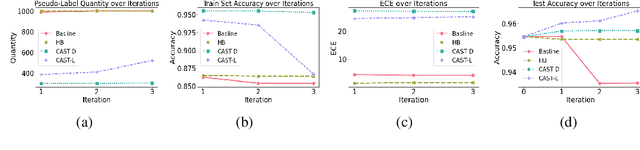
Self-training has gained attraction because of its simplicity and versatility, yet it is vulnerable to noisy pseudo-labels. Several studies have proposed successful approaches to tackle this issue, but they have diminished the advantages of self-training because they require specific modifications in self-training algorithms or model architectures. Furthermore, most of them are incompatible with gradient boosting decision trees, which dominate the tabular domain. To address this, we revisit the cluster assumption, which states that data samples that are close to each other tend to belong to the same class. Inspired by the assumption, we propose Cluster-Aware Self-Training (CAST) for tabular data. CAST is a simple and universally adaptable approach for enhancing existing self-training algorithms without significant modifications. Concretely, our method regularizes the confidence of the classifier, which represents the value of the pseudo-label, forcing the pseudo-labels in low-density regions to have lower confidence by leveraging prior knowledge for each class within the training data. Extensive empirical evaluations on up to 20 real-world datasets confirm not only the superior performance of CAST but also its robustness in various setups in self-training contexts.
L-SA: Learning Under-Explored Targets in Multi-Target Reinforcement Learning
May 23, 2023



Tasks that involve interaction with various targets are called multi-target tasks. When applying general reinforcement learning approaches for such tasks, certain targets that are difficult to access or interact with may be neglected throughout the course of training - a predicament we call Under-explored Target Problem (UTP). To address this problem, we propose L-SA (Learning by adaptive Sampling and Active querying) framework that includes adaptive sampling and active querying. In the L-SA framework, adaptive sampling dynamically samples targets with the highest increase of success rates at a high proportion, resulting in curricular learning from easy to hard targets. Active querying prompts the agent to interact more frequently with under-explored targets that need more experience or exploration. Our experimental results on visual navigation tasks show that the L-SA framework improves sample efficiency as well as success rates on various multi-target tasks with UTP. Also, it is experimentally demonstrated that the cyclic relationship between adaptive sampling and active querying effectively improves the sample richness of under-explored targets and alleviates UTP.
Learning Geometry-aware Representations by Sketching
Apr 17, 2023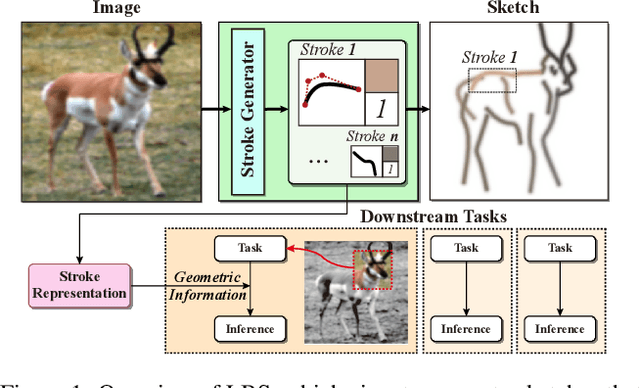
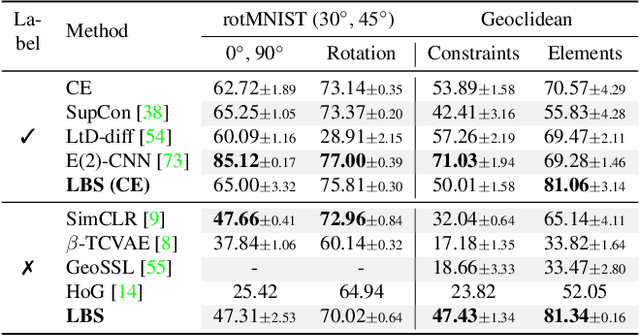
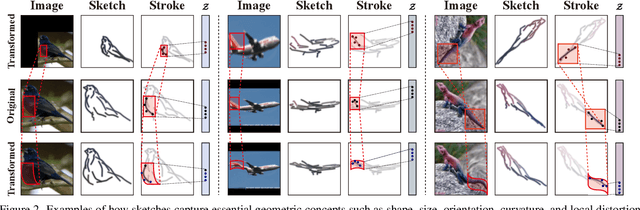
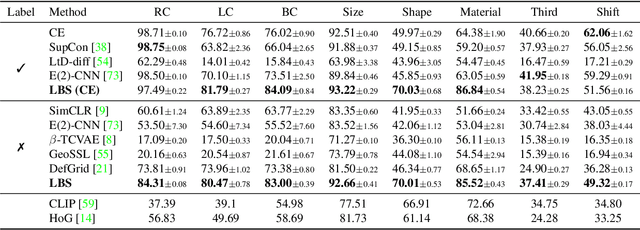
Understanding geometric concepts, such as distance and shape, is essential for understanding the real world and also for many vision tasks. To incorporate such information into a visual representation of a scene, we propose learning to represent the scene by sketching, inspired by human behavior. Our method, coined Learning by Sketching (LBS), learns to convert an image into a set of colored strokes that explicitly incorporate the geometric information of the scene in a single inference step without requiring a sketch dataset. A sketch is then generated from the strokes where CLIP-based perceptual loss maintains a semantic similarity between the sketch and the image. We show theoretically that sketching is equivariant with respect to arbitrary affine transformations and thus provably preserves geometric information. Experimental results show that LBS substantially improves the performance of object attribute classification on the unlabeled CLEVR dataset, domain transfer between CLEVR and STL-10 datasets, and for diverse downstream tasks, confirming that LBS provides rich geometric information.
Goal-Aware Cross-Entropy for Multi-Target Reinforcement Learning
Oct 26, 2021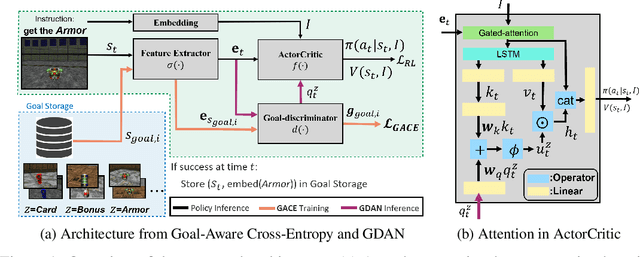
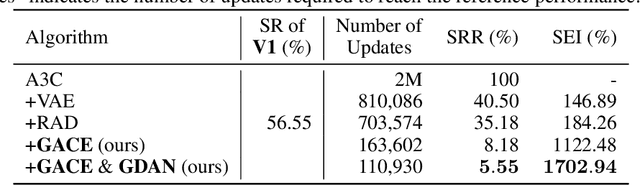
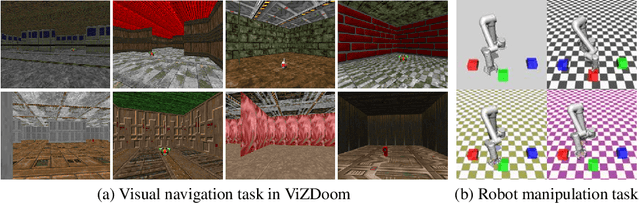
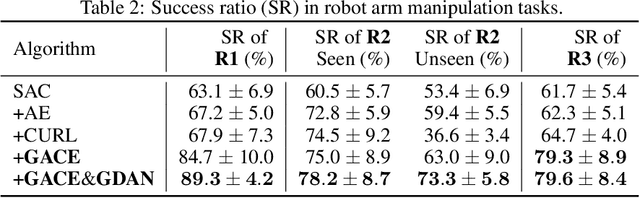
Learning in a multi-target environment without prior knowledge about the targets requires a large amount of samples and makes generalization difficult. To solve this problem, it is important to be able to discriminate targets through semantic understanding. In this paper, we propose goal-aware cross-entropy (GACE) loss, that can be utilized in a self-supervised way using auto-labeled goal states alongside reinforcement learning. Based on the loss, we then devise goal-discriminative attention networks (GDAN) which utilize the goal-relevant information to focus on the given instruction. We evaluate the proposed methods on visual navigation and robot arm manipulation tasks with multi-target environments and show that GDAN outperforms the state-of-the-art methods in terms of task success ratio, sample efficiency, and generalization. Additionally, qualitative analyses demonstrate that our proposed method can help the agent become aware of and focus on the given instruction clearly, promoting goal-directed behavior.