 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Geometry-aware Representations by Sketching
Apr 17, 2023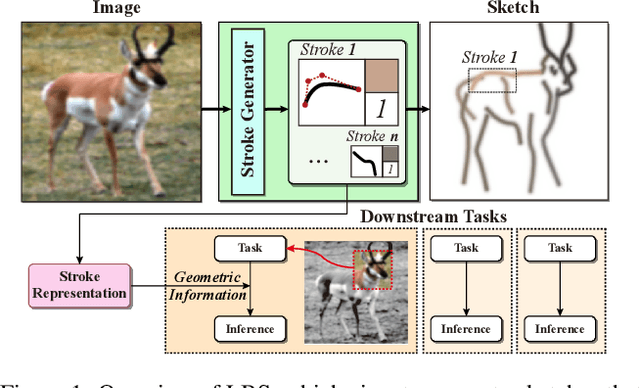
Understanding geometric concepts, such as distance and shape, is essential for understanding the real world and also for many vision tasks. To incorporate such information into a visual representation of a scene, we propose learning to represent the scene by sketching, inspired by human behavior. Our method, coined Learning by Sketching (LBS), learns to convert an image into a set of colored strokes that explicitly incorporate the geometric information of the scene in a single inference step without requiring a sketch dataset. A sketch is then generated from the strokes where CLIP-based perceptual loss maintains a semantic similarity between the sketch and the image. We show theoretically that sketching is equivariant with respect to arbitrary affine transformations and thus provably preserves geometric information. Experimental results show that LBS substantially improves the performance of object attribute classification on the unlabeled CLEVR dataset, domain transfer between CLEVR and STL-10 datasets, and for diverse downstream tasks, confirming that LBS provides rich geometric information.
CTRL-C: Camera calibration TRansformer with Line-Classification
Sep 06, 2021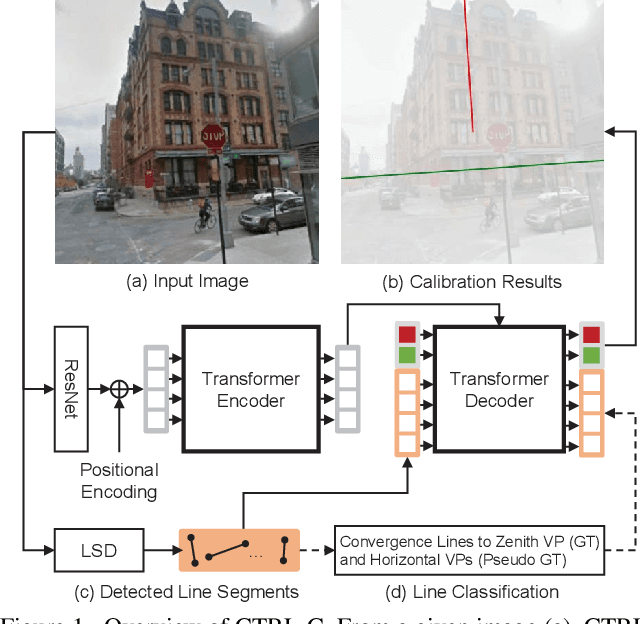
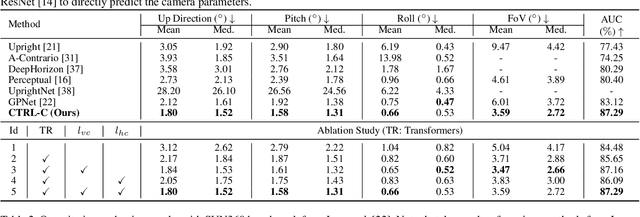
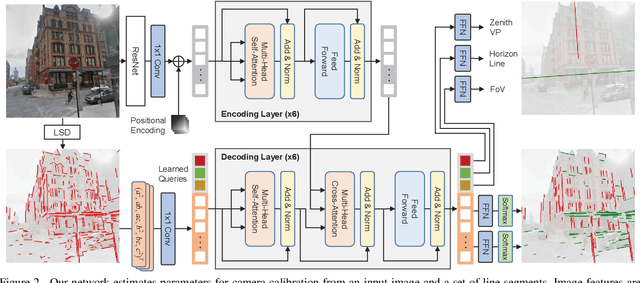
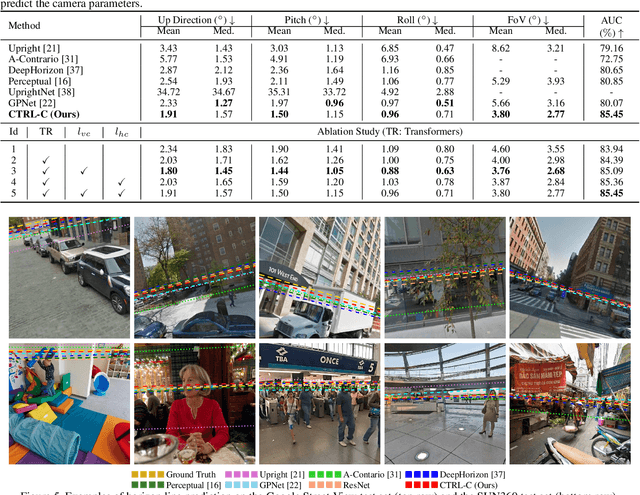
Single image camera calibration is the task of estimating the camera parameters from a single input image, such as the vanishing points, focal length, and horizon line. In this work, we propose Camera calibration TRansformer with Line-Classification (CTRL-C), an end-to-end neural network-based approach to single image camera calibration, which directly estimates the camera parameters from an image and a set of line segments. Our network adopts the transformer architecture to capture the global structure of an image with multi-modal inputs in an end-to-end manner. We also propose an auxiliary task of line classification to train the network to extract the global geometric information from lines effectively. Our experiments demonstrate that CTRL-C outperforms the previous state-of-the-art methods on the Google Street View and SUN360 benchmark datasets.