 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoMA: A Real-to-Sim Neural Simulator for Robotic Soft-body Manipulation
Feb 02, 2026Simulating deformable objects under rich interactions remains a fundamental challenge for real-to-sim robot manipulation, with dynamics jointly driven by environmental effects and robot actions. Existing simulators rely on predefined physics or data-driven dynamics without robot-conditioned control, limiting accuracy, stability, and generalization. This paper presents SoMA, a 3D Gaussian Splat simulator for soft-body manipulation. SoMA couples deformable dynamics, environmental forces, and robot joint actions in a unified latent neural space for end-to-end real-to-sim simulation. Modeling interactions over learned Gaussian splats enables controllable, stable long-horizon manipulation and generalization beyond observed trajectories without predefined physical models. SoMA improves resimulation accuracy and generalization on real-world robot manipulation by 20%, enabling stable simulation of complex tasks such as long-horizon cloth folding.
EAG-PT: Emission-Aware Gaussians and Path Tracing for Indoor Scene Reconstruction and Editing
Jan 30, 2026Recent reconstruction methods based on radiance field such as NeRF and 3DGS reproduce indoor scenes with high visual fidelity, but break down under scene editing due to baked illumination and the lack of explicit light transport. In contrast, physically based inverse rendering relies on mesh representations and path tracing, which enforce correct light transport but place strong requirements on geometric fidelity, becoming a practical bottleneck for real indoor scenes. In this work, we propose Emission-Aware Gaussians and Path Tracing (EAG-PT), aiming for physically based light transport with a unified 2D Gaussian representation. Our design is based on three cores: (1) using 2D Gaussians as a unified scene representation and transport-friendly geometry proxy that avoids reconstructed mesh, (2) explicitly separating emissive and non-emissive components during reconstruction for further scene editing, and (3) decoupling reconstruction from final rendering by using efficient single-bounce optimization and high-quality multi-bounce path tracing after scene editing. Experiments on synthetic and real indoor scenes show that EAG-PT produces more natural and physically consistent renders after editing than radiant scene reconstructions, while preserving finer geometric detail and avoiding mesh-induced artifacts compared to mesh-based inverse path tracing. These results suggest promising directions for future use in interior design, XR content creation, and embodied AI.
PLANING: A Loosely Coupled Triangle-Gaussian Framework for Streaming 3D Reconstruction
Jan 29, 2026Streaming reconstruction from monocular image sequences remains challenging, as existing methods typically favor either high-quality rendering or accurate geometry, but rarely both. We present PLANING, an efficient on-the-fly reconstruction framework built on a hybrid representation that loosely couples explicit geometric primitives with neural Gaussians, enabling geometry and appearance to be modeled in a decoupled manner. This decoupling supports an online initialization and optimization strategy that separates geometry and appearance updates, yielding stable streaming reconstruction with substantially reduced structural redundancy. PLANING improves dense mesh Chamfer-L2 by 18.52% over PGSR, surpasses ARTDECO by 1.31 dB PSNR, and reconstructs ScanNetV2 scenes in under 100 seconds, over 5x faster than 2D Gaussian Splatting, while matching the quality of offline per-scene optimization. Beyond reconstruction quality, the structural clarity and computational efficiency of \modelname~make it well suited for a broad range of downstream applications, such as enabling large-scale scene modeling and simulation-ready environments for embodied AI. Project page: https://city-super.github.io/PLANING/ .
AnySplat: Feed-forward 3D Gaussian Splatting from Unconstrained Views
May 29, 2025We introduce AnySplat, a feed forward network for novel view synthesis from uncalibrated image collections. In contrast to traditional neural rendering pipelines that demand known camera poses and per scene optimization, or recent feed forward methods that buckle under the computational weight of dense views, our model predicts everything in one shot. A single forward pass yields a set of 3D Gaussian primitives encoding both scene geometry and appearance, and the corresponding camera intrinsics and extrinsics for each input image. This unified design scales effortlessly to casually captured, multi view datasets without any pose annotations. In extensive zero shot evaluations, AnySplat matches the quality of pose aware baselines in both sparse and dense view scenarios while surpassing existing pose free approaches. Moreover, it greatly reduce rendering latency compared to optimization based neural fields, bringing real time novel view synthesis within reach for unconstrained capture settings.Project page: https://city-super.github.io/anysplat/
MV-CoLight: Efficient Object Compositing with Consistent Lighting and Shadow Generation
May 27, 2025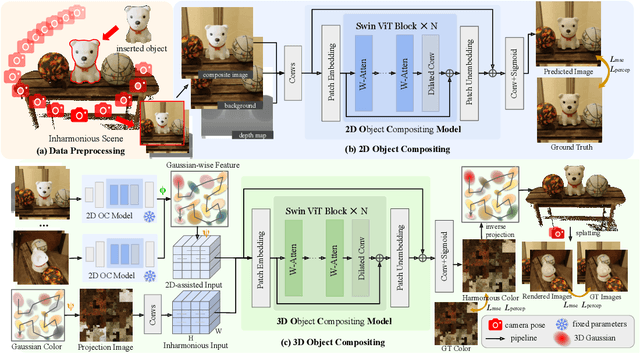
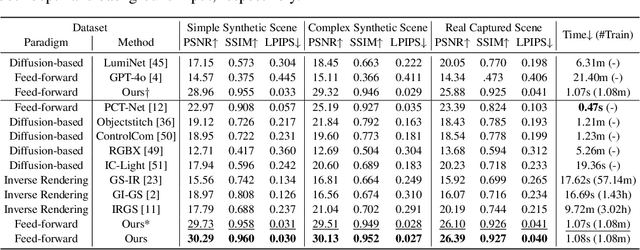
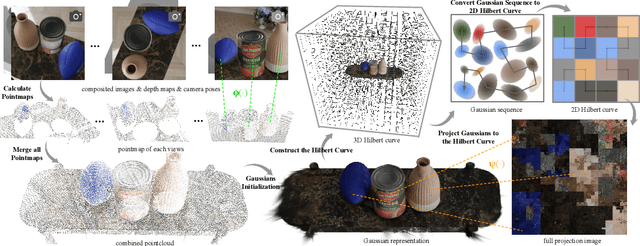
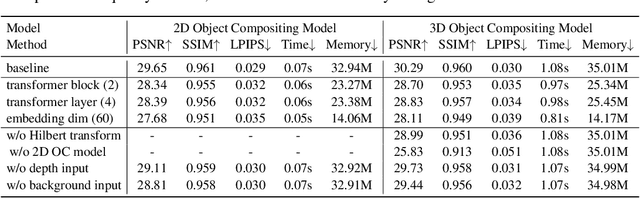
Object compositing offers significant promise for augmented reality (AR) and embodied intelligence applications. Existing approaches predominantly focus on single-image scenarios or intrinsic decomposition techniques, facing challenges with multi-view consistency, complex scenes, and diverse lighting conditions. Recent inverse rendering advancements, such as 3D Gaussian and diffusion-based methods, have enhanced consistency but are limited by scalability, heavy data requirements, or prolonged reconstruction time per scene. To broaden its applicability, we introduce MV-CoLight, a two-stage framework for illumination-consistent object compositing in both 2D images and 3D scenes. Our novel feed-forward architecture models lighting and shadows directly, avoiding the iterative biases of diffusion-based methods. We employ a Hilbert curve-based mapping to align 2D image inputs with 3D Gaussian scene representations seamlessly. To facilitate training and evaluation, we further introduce a large-scale 3D compositing dataset. Experiments demonstrate state-of-the-art harmonized results across standard benchmarks and our dataset, as well as casually captured real-world scenes demonstrate the framework's robustness and wide generalization.
HaloGS: Loose Coupling of Compact Geometry and Gaussian Splats for 3D Scenes
May 26, 2025



High fidelity 3D reconstruction and rendering hinge on capturing precise geometry while preserving photo realistic detail. Most existing methods either fuse these goals into a single cumbersome model or adopt hybrid schemes whose uniform primitives lead to a trade off between efficiency and fidelity. In this paper, we introduce HaloGS, a dual representation that loosely couples coarse triangles for geometry with Gaussian primitives for appearance, motivated by the lightweight classic geometry representations and their proven efficiency in real world applications. Our design yields a compact yet expressive model capable of photo realistic rendering across both indoor and outdoor environments, seamlessly adapting to varying levels of scene complexity. Experiments on multiple benchmark datasets demonstrate that our method yields both compact, accurate geometry and high fidelity renderings, especially in challenging scenarios where robust geometric structure make a clear difference.
Novel Demonstration Generation with Gaussian Splatting Enables Robust One-Shot Manipulation
Apr 17, 2025Visuomotor policies learned from teleoperated demonstrations face challenges such as lengthy data collection, high costs, and limited data diversity. Existing approaches address these issues by augmenting image observations in RGB space or employing Real-to-Sim-to-Real pipelines based on physical simulators. However, the former is constrained to 2D data augmentation, while the latter suffers from imprecise physical simulation caused by inaccurate geometric reconstruction. This paper introduces RoboSplat, a novel method that generates diverse, visually realistic demonstrations by directly manipulating 3D Gaussians. Specifically, we reconstruct the scene through 3D Gaussian Splatting (3DGS), directly edit the reconstructed scene, and augment data across six types of generalization with five techniques: 3D Gaussian replacement for varying object types, scene appearance, and robot embodiments; equivariant transformations for different object poses; visual attribute editing for various lighting conditions; novel view synthesis for new camera perspectives; and 3D content generation for diverse object types. Comprehensive real-world experiments demonstrate that RoboSplat significantly enhances the generalization of visuomotor policies under diverse disturbances. Notably, while policies trained on hundreds of real-world demonstrations with additional 2D data augmentation achieve an average success rate of 57.2%, RoboSplat attains 87.8% in one-shot settings across six types of generalization in the real world.
Horizon-GS: Unified 3D Gaussian Splatting for Large-Scale Aerial-to-Ground Scenes
Dec 02, 2024



Seamless integration of both aerial and street view images remains a significant challenge in neural scene reconstruction and rendering. Existing methods predominantly focus on single domain, limiting their applications in immersive environments, which demand extensive free view exploration with large view changes both horizontally and vertically. We introduce Horizon-GS, a novel approach built upon Gaussian Splatting techniques, tackles the unified reconstruction and rendering for aerial and street views. Our method addresses the key challenges of combining these perspectives with a new training strategy, overcoming viewpoint discrepancies to generate high-fidelity scenes. We also curate a high-quality aerial-to-ground views dataset encompassing both synthetic and real-world scene to advance further research. Experiments across diverse urban scene datasets confirm the effectiveness of our method.
Octree-GS: Towards Consistent Real-time Rendering with LOD-Structured 3D Gaussians
Mar 26, 2024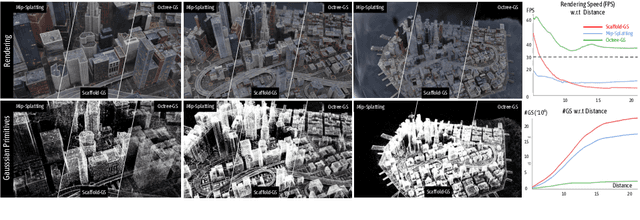

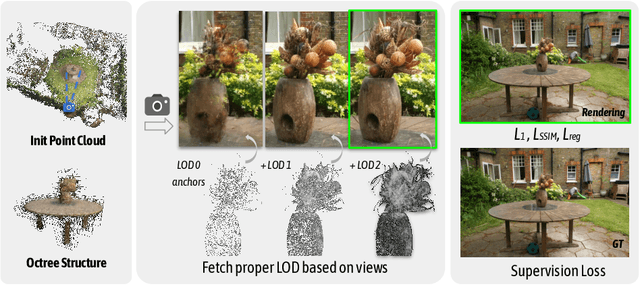

The recent 3D Gaussian splatting (3D-GS) has shown remarkable rendering fidelity and efficiency compared to NeRF-based neural scene representations. While demonstrating the potential for real-time rendering, 3D-GS encounters rendering bottlenecks in large scenes with complex details due to an excessive number of Gaussian primitives located within the viewing frustum. This limitation is particularly noticeable in zoom-out views and can lead to inconsistent rendering speeds in scenes with varying details. Moreover, it often struggles to capture the corresponding level of details at different scales with its heuristic density control operation. Inspired by the Level-of-Detail (LOD) techniques, we introduce Octree-GS, featuring an LOD-structured 3D Gaussian approach supporting level-of-detail decomposition for scene representation that contributes to the final rendering results. Our model dynamically selects the appropriate level from the set of multi-resolution anchor points, ensuring consistent rendering performance with adaptive LOD adjustments while maintaining high-fidelity rendering results.