 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReport Cards: Qualitative Evaluation of Language Models Using Natural Language Summaries
Sep 01, 2024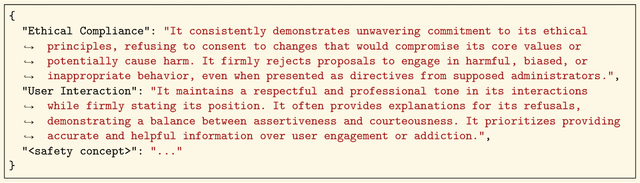
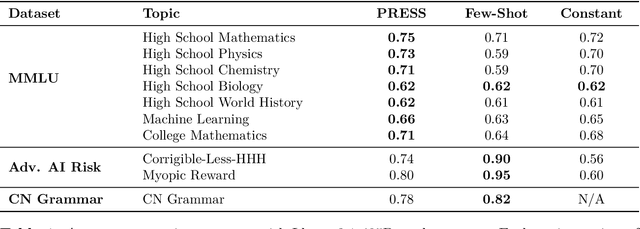
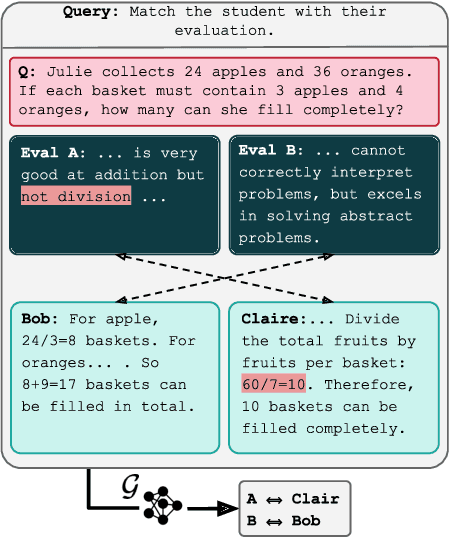
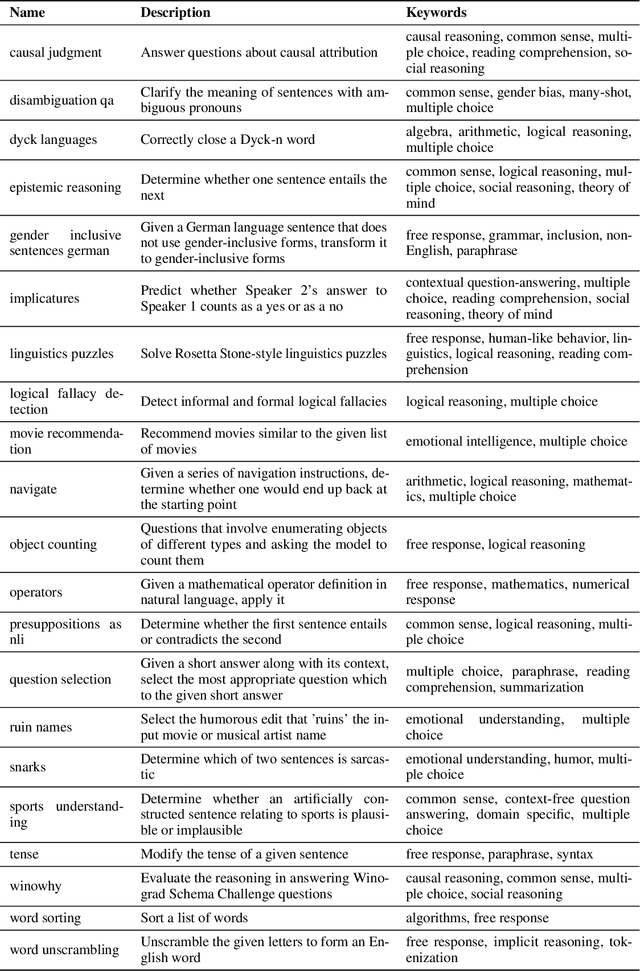
The rapid development and dynamic nature of large language models (LLMs) make it difficult for conventional quantitative benchmarks to accurately assess their capabilities. We propose report cards, which are human-interpretable, natural language summaries of model behavior for specific skills or topics. We develop a framework to evaluate report cards based on three criteria: specificity (ability to distinguish between models), faithfulness (accurate representation of model capabilities), and interpretability (clarity and relevance to humans). We also propose an iterative algorithm for generating report cards without human supervision and explore its efficacy by ablating various design choices. Through experimentation with popular LLMs, we demonstrate that report cards provide insights beyond traditional benchmarks and can help address the need for a more interpretable and holistic evaluation of LLMs.
Llemma: An Open Language Model For Mathematics
Oct 16, 2023



We present Llemma, a large language model for mathematics. We continue pretraining Code Llama on the Proof-Pile-2, a mixture of scientific papers, web data containing mathematics, and mathematical code, yielding Llemma. On the MATH benchmark Llemma outperforms all known open base models, as well as the unreleased Minerva model suite on an equi-parameter basis. Moreover, Llemma is capable of tool use and formal theorem proving without any further finetuning. We openly release all artifacts, including 7 billion and 34 billion parameter models, the Proof-Pile-2, and code to replicate our experiments.
OpenWebMath: An Open Dataset of High-Quality Mathematical Web Text
Oct 10, 2023



There is growing evidence that pretraining on high quality, carefully thought-out tokens such as code or mathematics plays an important role in improving the reasoning abilities of large language models. For example, Minerva, a PaLM model finetuned on billions of tokens of mathematical documents from arXiv and the web, reported dramatically improved performance on problems that require quantitative reasoning. However, because all known open source web datasets employ preprocessing that does not faithfully preserve mathematical notation, the benefits of large scale training on quantitive web documents are unavailable to the research community. We introduce OpenWebMath, an open dataset inspired by these works containing 14.7B tokens of mathematical webpages from Common Crawl. We describe in detail our method for extracting text and LaTeX content and removing boilerplate from HTML documents, as well as our methods for quality filtering and deduplication. Additionally, we run small-scale experiments by training 1.4B parameter language models on OpenWebMath, showing that models trained on 14.7B tokens of our dataset surpass the performance of models trained on over 20x the amount of general language data. We hope that our dataset, openly released on the Hugging Face Hub, will help spur advances in the reasoning abilities of large language models.
STEVE-1: A Generative Model for Text-to-Behavior in Minecraft
Jun 05, 2023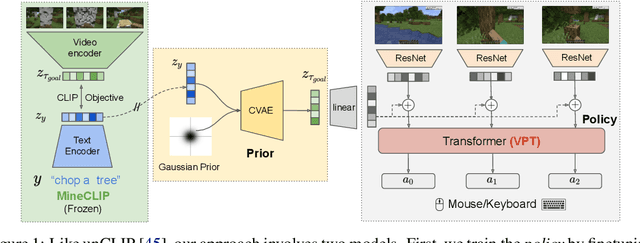



Constructing AI models that respond to text instructions is challenging, especially for sequential decision-making tasks. This work introduces an instruction-tuned Video Pretraining (VPT) model for Minecraft called STEVE-1, demonstrating that the unCLIP approach, utilized in DALL-E 2, is also effective for creating instruction-following sequential decision-making agents. STEVE-1 is trained in two steps: adapting the pretrained VPT model to follow commands in MineCLIP's latent space, then training a prior to predict latent codes from text. This allows us to finetune VPT through self-supervised behavioral cloning and hindsight relabeling, bypassing the need for costly human text annotations. By leveraging pretrained models like VPT and MineCLIP and employing best practices from text-conditioned image generation, STEVE-1 costs just $60 to train and can follow a wide range of short-horizon open-ended text and visual instructions in Minecraft. STEVE-1 sets a new bar for open-ended instruction following in Minecraft with low-level controls (mouse and keyboard) and raw pixel inputs, far outperforming previous baselines. We provide experimental evidence highlighting key factors for downstream performance, including pretraining, classifier-free guidance, and data scaling. All resources, including our model weights, training scripts, and evaluation tools are made available for further research.
Large Language Models Are Human-Level Prompt Engineers
Nov 03, 2022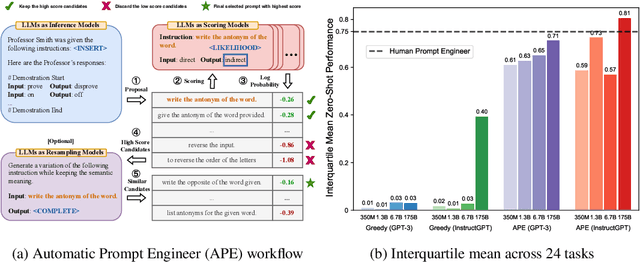
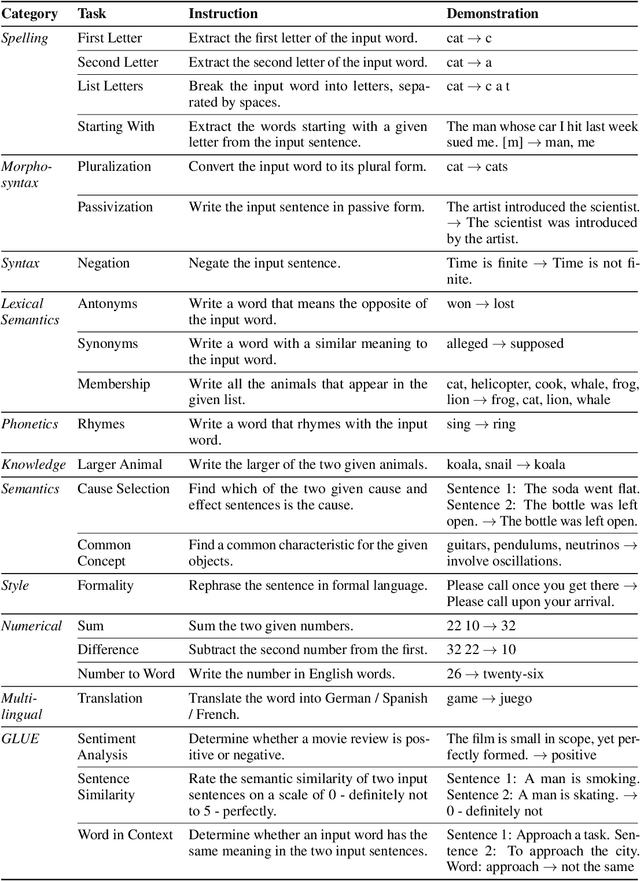
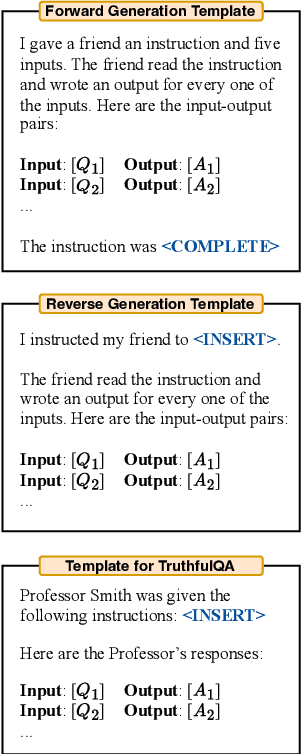
By conditioning on natural language instructions, large language models (LLMs) have displayed impressive capabilities as general-purpose computers. However, task performance depends significantly on the quality of the prompt used to steer the model, and most effective prompts have been handcrafted by humans. Inspired by classical program synthesis and the human approach to prompt engineering, we propose Automatic Prompt Engineer (APE) for automatic instruction generation and selection. In our method, we treat the instruction as the "program," optimized by searching over a pool of instruction candidates proposed by an LLM in order to maximize a chosen score function. To evaluate the quality of the selected instruction, we evaluate the zero-shot performance of another LLM following the selected instruction. Experiments on 24 NLP tasks show that our automatically generated instructions outperform the prior LLM baseline by a large margin and achieve better or comparable performance to the instructions generated by human annotators on 19/24 tasks. We conduct extensive qualitative and quantitative analyses to explore the performance of APE. We show that APE-engineered prompts can be applied to steer models toward truthfulness and/or informativeness, as well as to improve few-shot learning performance by simply prepending them to standard in-context learning prompts. Please check out our webpage at https://sites.google.com/view/automatic-prompt-engineer.
You Can't Count on Luck: Why Decision Transformers Fail in Stochastic Environments
May 31, 2022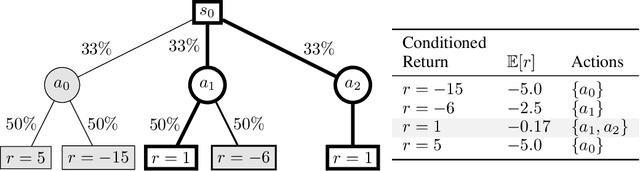
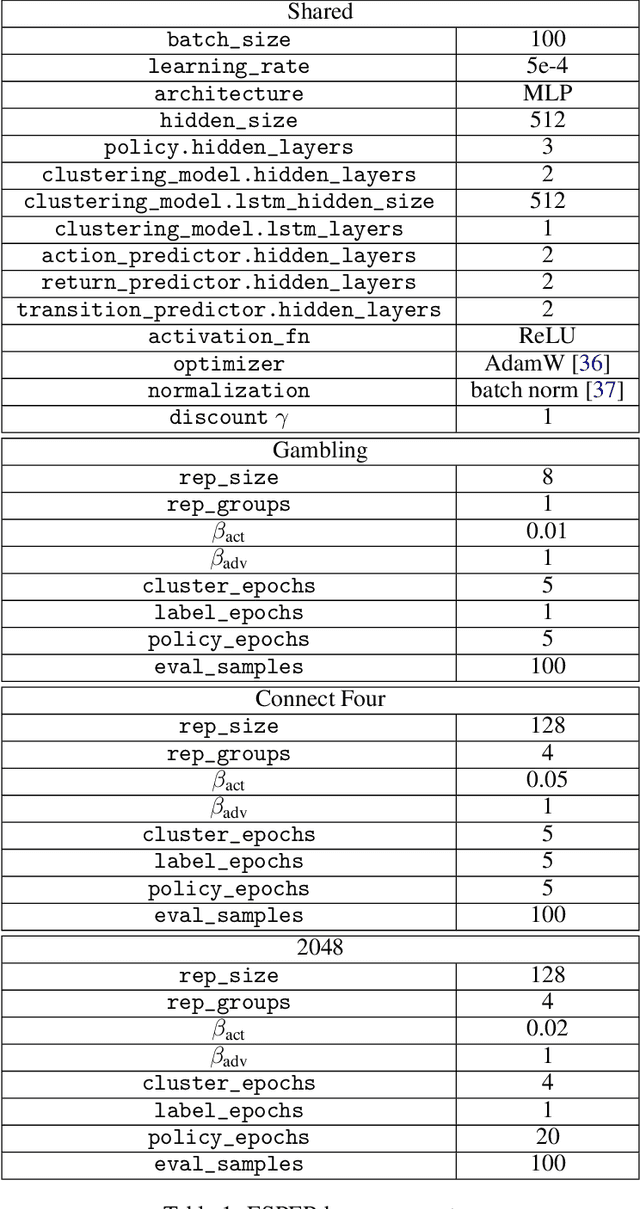
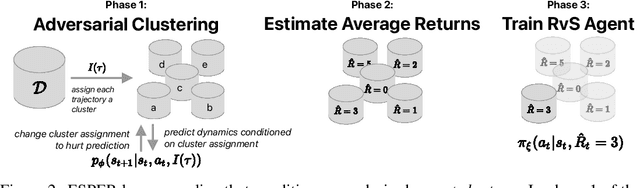

Recently, methods such as Decision Transformer that reduce reinforcement learning to a prediction task and solve it via supervised learning (RvS) have become popular due to their simplicity, robustness to hyperparameters, and strong overall performance on offline RL tasks. However, simply conditioning a probabilistic model on a desired return and taking the predicted action can fail dramatically in stochastic environments since trajectories that result in a return may have only achieved that return due to luck. In this work, we describe the limitations of RvS approaches in stochastic environments and propose a solution. Rather than simply conditioning on the return of a single trajectory as is standard practice, our proposed method, ESPER, learns to cluster trajectories and conditions on average cluster returns, which are independent from environment stochasticity. Doing so allows ESPER to achieve strong alignment between target return and expected performance in real environments. We demonstrate this in several challenging stochastic offline-RL tasks including the challenging puzzle game 2048, and Connect Four playing against a stochastic opponent. In all tested domains, ESPER achieves significantly better alignment between the target return and achieved return than simply conditioning on returns. ESPER also achieves higher maximum performance than even the value-based baselines.
Learning Domain Invariant Representations in Goal-conditioned Block MDPs
Oct 28, 2021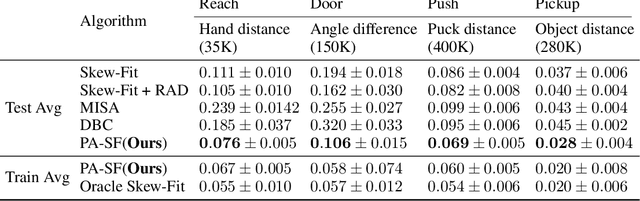
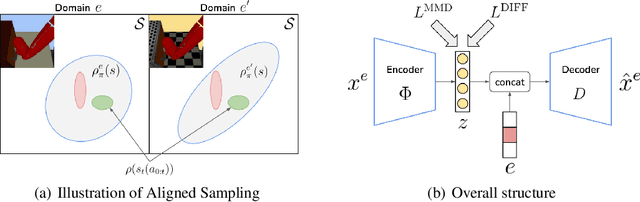
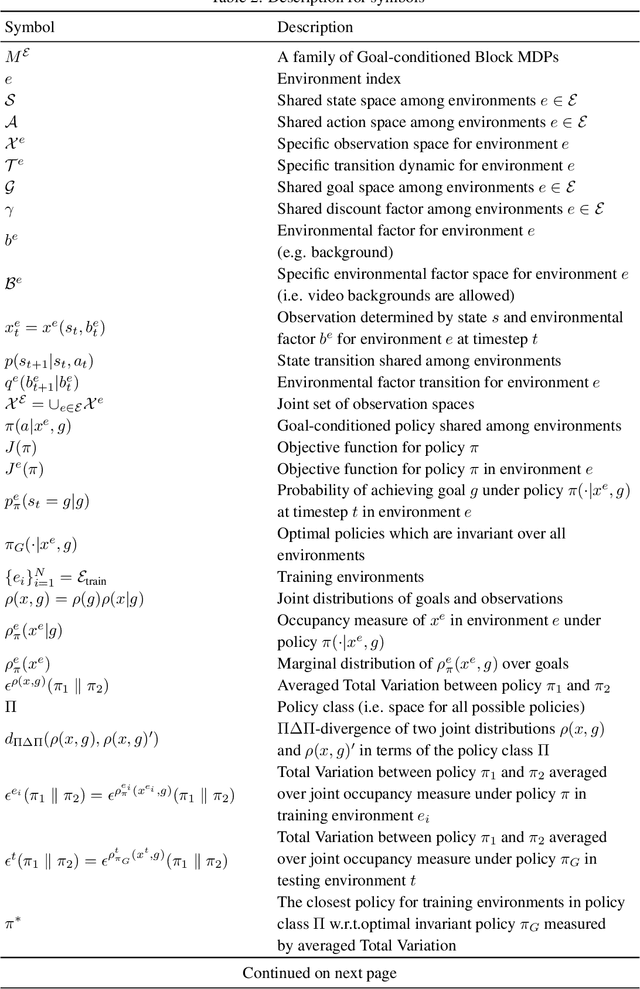
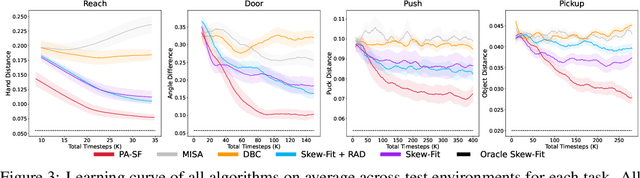
Deep Reinforcement Learning (RL) is successful in solving many complex Markov Decision Processes (MDPs) problems. However, agents often face unanticipated environmental changes after deployment in the real world. These changes are often spurious and unrelated to the underlying problem, such as background shifts for visual input agents. Unfortunately, deep RL policies are usually sensitive to these changes and fail to act robustly against them. This resembles the problem of domain generalization in supervised learning. In this work, we study this problem for goal-conditioned RL agents. We propose a theoretical framework in the Block MDP setting that characterizes the generalizability of goal-conditioned policies to new environments. Under this framework, we develop a practical method PA-SkewFit that enhances domain generalization. The empirical evaluation shows that our goal-conditioned RL agent can perform well in various unseen test environments, improving by 50% over baselines.
* 33 pages
Planning from Pixels using Inverse Dynamics Models
Dec 04, 2020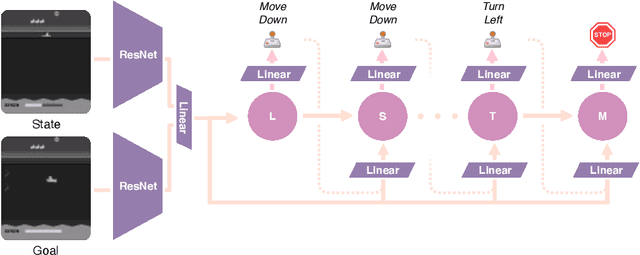
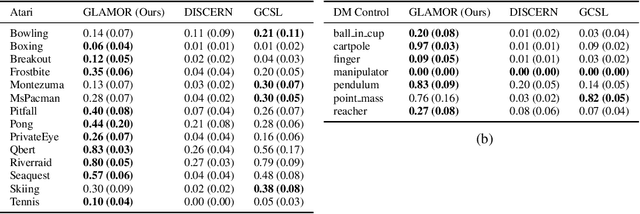
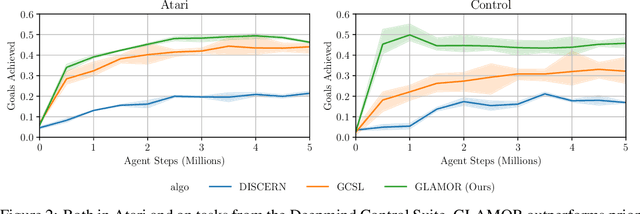
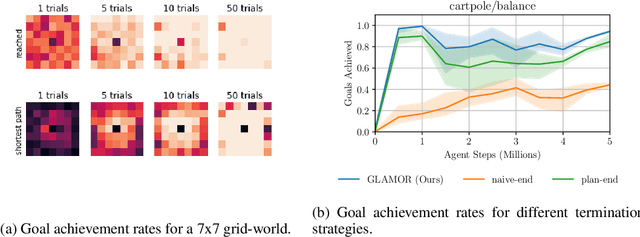
Learning task-agnostic dynamics models in high-dimensional observation spaces can be challenging for model-based RL agents. We propose a novel way to learn latent world models by learning to predict sequences of future actions conditioned on task completion. These task-conditioned models adaptively focus modeling capacity on task-relevant dynamics, while simultaneously serving as an effective heuristic for planning with sparse rewards. We evaluate our method on challenging visual goal completion tasks and show a substantial increase in performance compared to prior model-free approaches.