 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Domain Invariant Representations in Goal-conditioned Block MDPs
Paper and Code
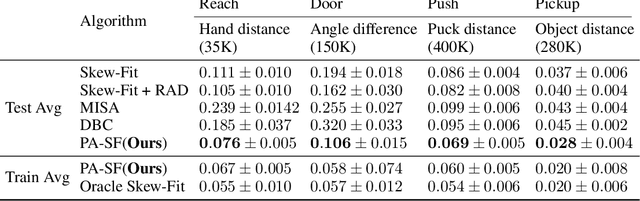
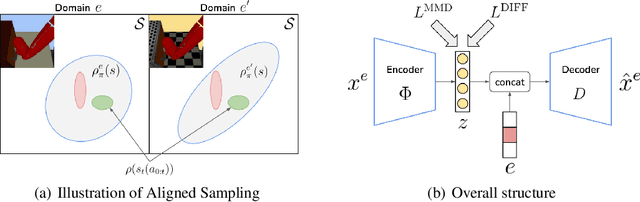
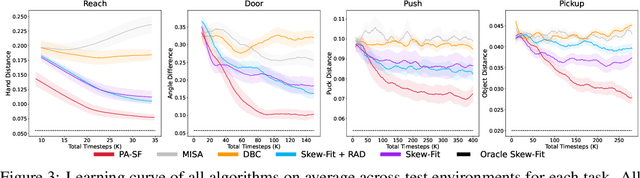
Deep Reinforcement Learning (RL) is successful in solving many complex Markov Decision Processes (MDPs) problems. However, agents often face unanticipated environmental changes after deployment in the real world. These changes are often spurious and unrelated to the underlying problem, such as background shifts for visual input agents. Unfortunately, deep RL policies are usually sensitive to these changes and fail to act robustly against them. This resembles the problem of domain generalization in supervised learning. In this work, we study this problem for goal-conditioned RL agents. We propose a theoretical framework in the Block MDP setting that characterizes the generalizability of goal-conditioned policies to new environments. Under this framework, we develop a practical method PA-SkewFit that enhances domain generalization. The empirical evaluation shows that our goal-conditioned RL agent can perform well in various unseen test environments, improving by 50% over baselines.