 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Evaluation of Motion Plans Using Trajectory Predictors as Forward Reachable Set Estimators
Jul 30, 2025


The advent of end-to-end autonomy stacks - often lacking interpretable intermediate modules - has placed an increased burden on ensuring that the final output, i.e., the motion plan, is safe in order to validate the safety of the entire stack. This requires a safety monitor that is both complete (able to detect all unsafe plans) and sound (does not flag safe plans). In this work, we propose a principled safety monitor that leverages modern multi-modal trajectory predictors to approximate forward reachable sets (FRS) of surrounding agents. By formulating a convex program, we efficiently extract these data-driven FRSs directly from the predicted state distributions, conditioned on scene context such as lane topology and agent history. To ensure completeness, we leverage conformal prediction to calibrate the FRS and guarantee coverage of ground-truth trajectories with high probability. To preserve soundness in out-of-distribution (OOD) scenarios or under predictor failure, we introduce a Bayesian filter that dynamically adjusts the FRS conservativeness based on the predictor's observed performance. We then assess the safety of the ego vehicle's motion plan by checking for intersections with these calibrated FRSs, ensuring the plan remains collision-free under plausible future behaviors of others. Extensive experiments on the nuScenes dataset show our approach significantly improves soundness while maintaining completeness, offering a practical and reliable safety monitor for learned autonomy stacks.
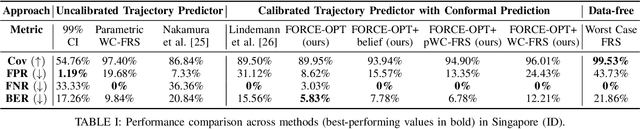
Enhancing Safety and Robustness of Vision-Based Controllers via Reachability Analysis
Oct 29, 2024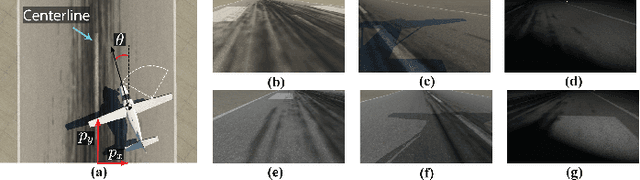
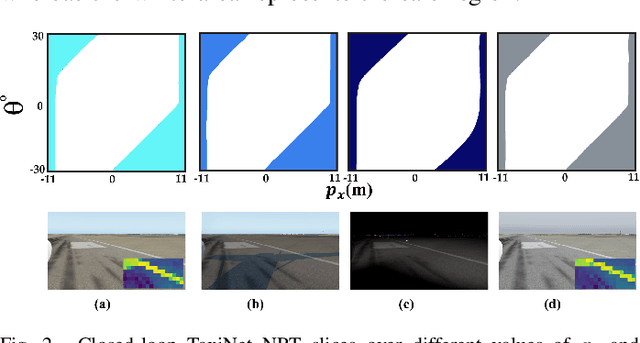
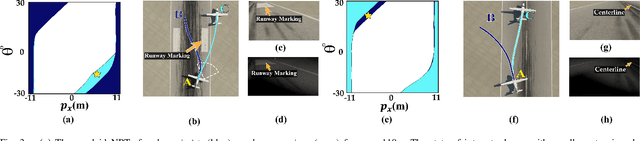
Autonomous systems, such as self-driving cars and drones, have made significant strides in recent years by leveraging visual inputs and machine learning for decision-making and control. Despite their impressive performance, these vision-based controllers can make erroneous predictions when faced with novel or out-of-distribution inputs. Such errors can cascade into catastrophic system failures and compromise system safety. In this work, we compute Neural Reachable Tubes, which act as parameterized approximations of Backward Reachable Tubes to stress-test the vision-based controllers and mine their failure modes. The identified failures are then used to enhance the system safety through both offline and online methods. The online approach involves training a classifier as a run-time failure monitor to detect closed-loop, system-level failures, subsequently triggering a fallback controller that robustly handles these detected failures to preserve system safety. For the offline approach, we improve the original controller via incremental training using a carefully augmented failure dataset, resulting in a more robust controller that is resistant to the known failure modes. In either approach, the system is safeguarded against shortcomings that transcend the vision-based controller and pertain to the closed-loop safety of the overall system. We validate the proposed approaches on an autonomous aircraft taxiing task that involves using a vision-based controller to guide the aircraft towards the centerline of the runway. Our results show the efficacy of the proposed algorithms in identifying and handling system-level failures, outperforming methods that rely on controller prediction error or uncertainty quantification for identifying system failures.
System-Level Safety Monitoring and Recovery for Perception Failures in Autonomous Vehicles
Sep 26, 2024
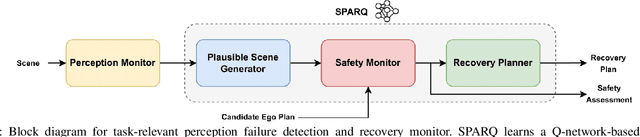
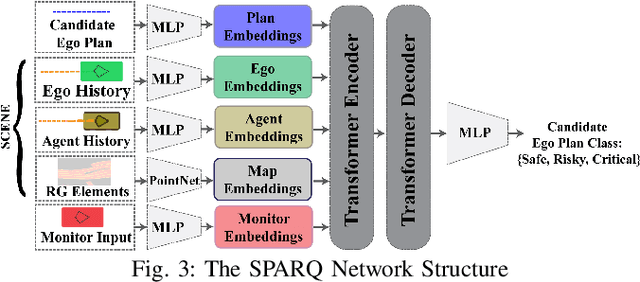
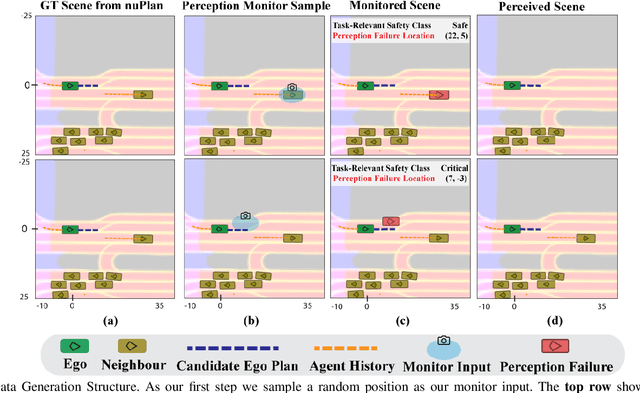
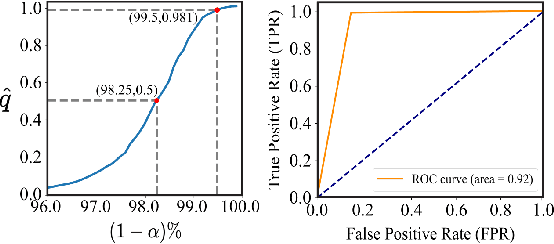
The safety-critical nature of autonomous vehicle (AV) operation necessitates development of task-relevant algorithms that can reason about safety at the system level and not just at the component level. To reason about the impact of a perception failure on the entire system performance, such task-relevant algorithms must contend with various challenges: complexity of AV stacks, high uncertainty in the operating environments, and the need for real-time performance. To overcome these challenges, in this work, we introduce a Q-network called SPARQ (abbreviation for Safety evaluation for Perception And Recovery Q-network) that evaluates the safety of a plan generated by a planning algorithm, accounting for perception failures that the planning process may have overlooked. This Q-network can be queried during system runtime to assess whether a proposed plan is safe for execution or poses potential safety risks. If a violation is detected, the network can then recommend a corrective plan while accounting for the perceptual failure. We validate our algorithm using the NuPlan-Vegas dataset, demonstrating its ability to handle cases where a perception failure compromises a proposed plan while the corrective plan remains safe. We observe an overall accuracy and recall of 90% while sustaining a frequency of 42Hz on the unseen testing dataset. We compare our performance to a popular reachability-based baseline and analyze some interesting properties of our approach in improving the safety properties of an AV pipeline.
On Safety and Liveness Filtering Using Hamilton-Jacobi Reachability Analysis
Dec 23, 2023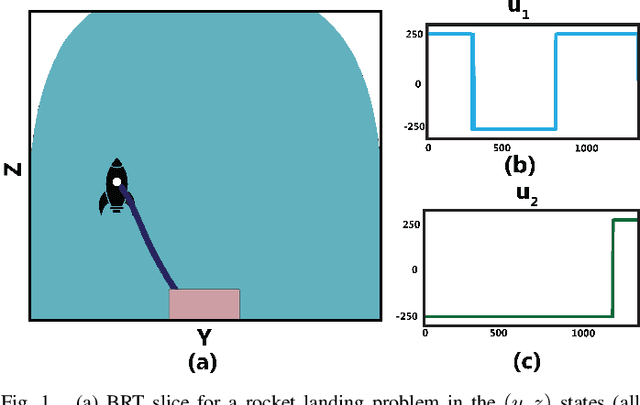
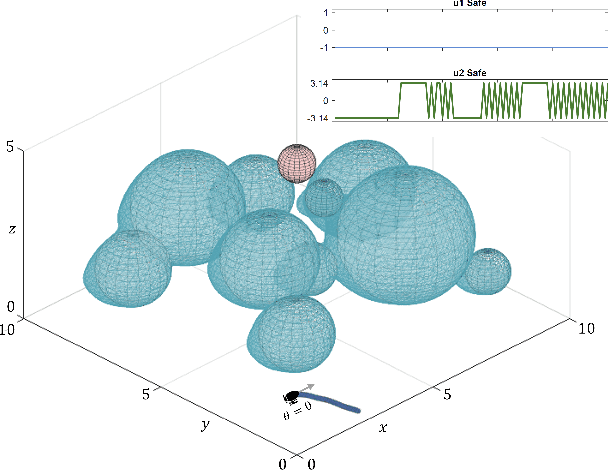
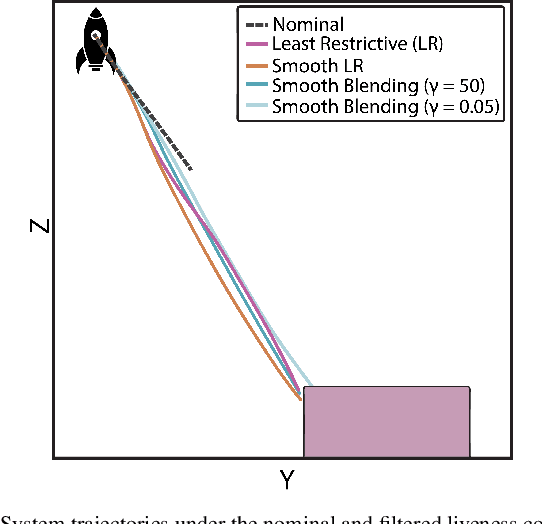
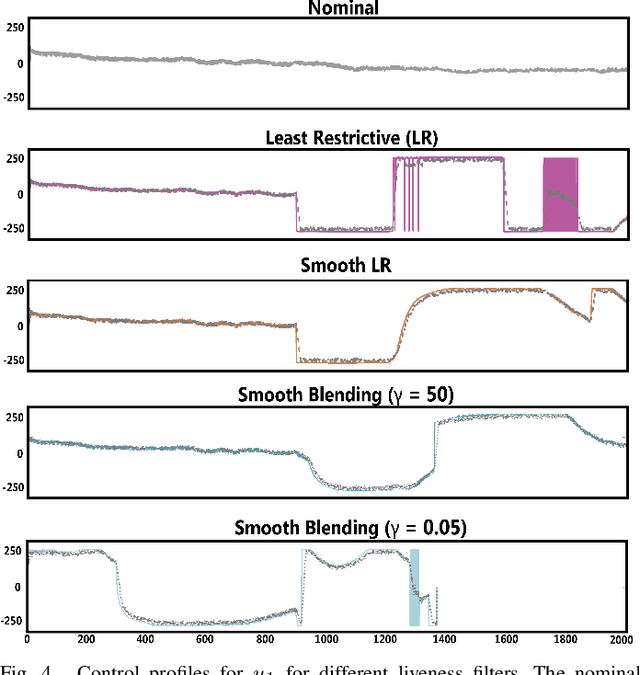
Hamilton-Jacobi (HJ) reachability-based filtering provides a powerful framework to co-optimize performance and safety (or liveness) for autonomous systems. Under this filtering scheme, a nominal controller is minimally modified to ensure system safety or liveness. However, the resulting controllers can exhibit abrupt switching and bang-bang behavior, which is not suitable for applications of autonomous systems in the real world. This work presents a novel, unifying framework to design safety and liveness filters through reachability analysis. We explicitly characterize the maximal set of control inputs that ensures safety (or liveness) at a given state. Different safety filters can then be constructed using different subsets of this maximal set along with a projection operator to modify the nominal controller. We use the proposed framework to design three safety filters, each balancing performance, computation time, and smoothness differently. The proposed filters can easily handle dynamics uncertainties, disturbances, and bounded control inputs. We highlight their relative strengths and limitations by applying these filters to autonomous navigation and rocket landing scenarios and on a physical robot testbed. We also discuss practical aspects associated with implementing these filters on real-world autonomous systems. Our research advances the understanding and potential application of reachability-based controllers on real-world autonomous systems.
Detecting and Mitigating System-Level Anomalies of Vision-Based Controllers
Sep 23, 2023



Autonomous systems, such as self-driving cars and drones, have made significant strides in recent years by leveraging visual inputs and machine learning for decision-making and control. Despite their impressive performance, these vision-based controllers can make erroneous predictions when faced with novel or out-of-distribution inputs. Such errors can cascade to catastrophic system failures and compromise system safety. In this work, we introduce a run-time anomaly monitor to detect and mitigate such closed-loop, system-level failures. Specifically, we leverage a reachability-based framework to stress-test the vision-based controller offline and mine its system-level failures. This data is then used to train a classifier that is leveraged online to flag inputs that might cause system breakdowns. The anomaly detector highlights issues that transcend individual modules and pertain to the safety of the overall system. We also design a fallback controller that robustly handles these detected anomalies to preserve system safety. We validate the proposed approach on an autonomous aircraft taxiing system that uses a vision-based controller for taxiing. Our results show the efficacy of the proposed approach in identifying and handling system-level anomalies, outperforming methods such as prediction error-based detection, and ensembling, thereby enhancing the overall safety and robustness of autonomous systems.
Discovering Closed-Loop Failures of Vision-Based Controllers via Reachability Analysis
Nov 04, 2022Machine learning driven image-based controllers allow robotic systems to take intelligent actions based on the visual feedback from their environment. Understanding when these controllers might lead to system safety violations is important for their integration in safety-critical applications and engineering corrective safety measures for the system. Existing methods leverage simulation-based testing (or falsification) to find the failures of vision-based controllers, i.e., the visual inputs that lead to closed-loop safety violations. However, these techniques do not scale well to the scenarios involving high-dimensional and complex visual inputs, such as RGB images. In this work, we cast the problem of finding closed-loop vision failures as a Hamilton-Jacobi (HJ) reachability problem. Our approach blends simulation-based analysis with HJ reachability methods to compute an approximation of the backward reachable tube (BRT) of the system, i.e., the set of unsafe states for the system under vision-based controllers. Utilizing the BRT, we can tractably and systematically find the system states and corresponding visual inputs that lead to closed-loop failures. These visual inputs can be subsequently analyzed to find the input characteristics that might have caused the failure. Besides its scalability to high-dimensional visual inputs, an explicit computation of BRT allows the proposed approach to capture non-trivial system failures that are difficult to expose via random simulations. We demonstrate our framework on two case studies involving an RGB image-based neural network controller for (a) autonomous indoor navigation, and (b) autonomous aircraft taxiing.
A Bootstrap-based Inference Framework for Testing Similarity of Paired Networks
Nov 25, 2019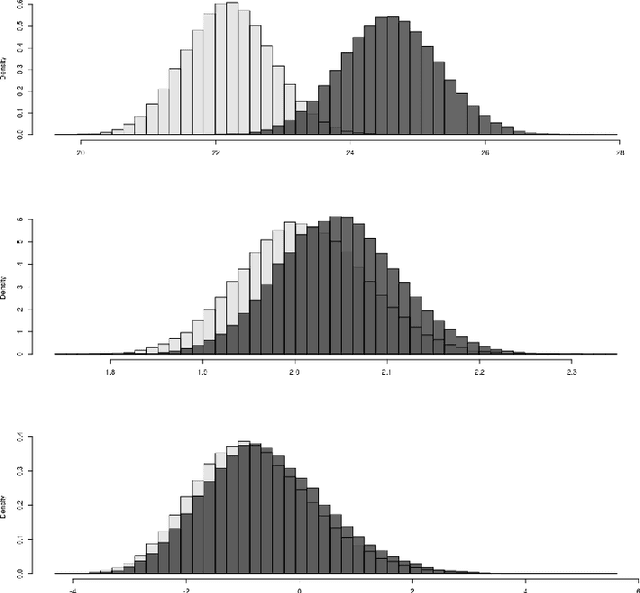
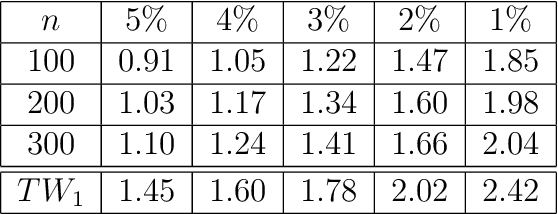
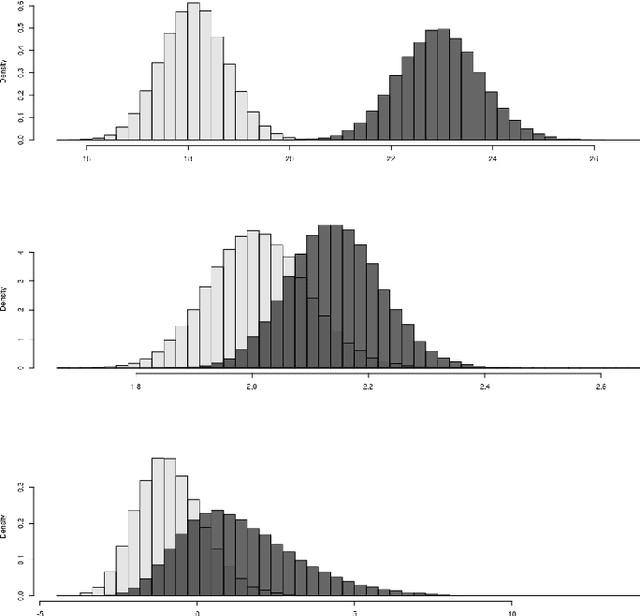
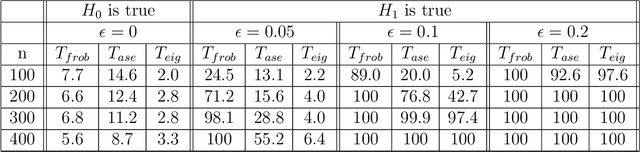
We live in an interconnected world where network valued data arises in many domains, and, fittingly, statistical network analysis has emerged as an active area in the literature. However, the topic of inference in networks has received relatively less attention. In this work, we consider the paired network inference problem where one is given two networks on the same set of nodes, and the goal is to test whether the given networks are stochastically similar in terms of some notion of similarity. We develop a general inferential framework based on parametric bootstrap to address this problem. Under this setting, we address two specific and important problems: the equality problem, i.e., whether the two networks are generated from the same random graph model, and the scaling problem, i.e., whether the underlying probability matrices of the two random graph models are scaled versions of each other.
Multiple Style-Transfer in Real-Time
Nov 18, 2019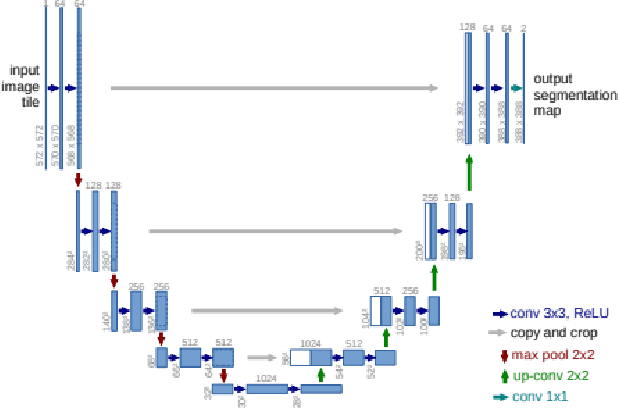
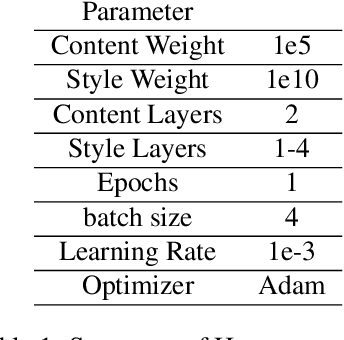
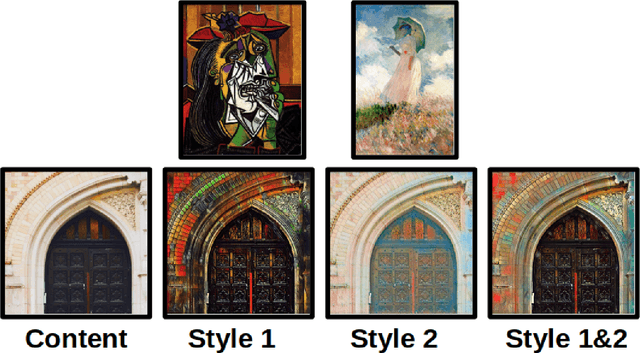

Style transfer aims to combine the content of one image with the artistic style of another. It was discovered that lower levels of convolutional networks captured style information, while higher levels captures content information. The original style transfer formulation used a weighted combination of VGG-16 layer activations to achieve this goal. Later, this was accomplished in real-time using a feed-forward network to learn the optimal combination of style and content features from the respective images. The first aim of our project was to introduce a framework for capturing the style from several images at once. We propose a method that extends the original real-time style transfer formulation by combining the features of several style images. This method successfully captures color information from the separate style images. The other aim of our project was to improve the temporal style continuity from frame to frame. Accordingly, we have experimented with the temporal stability of the output images and discussed the various available techniques that could be employed as alternatives.