 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystem-Level Safety Monitoring and Recovery for Perception Failures in Autonomous Vehicles
Paper and Code
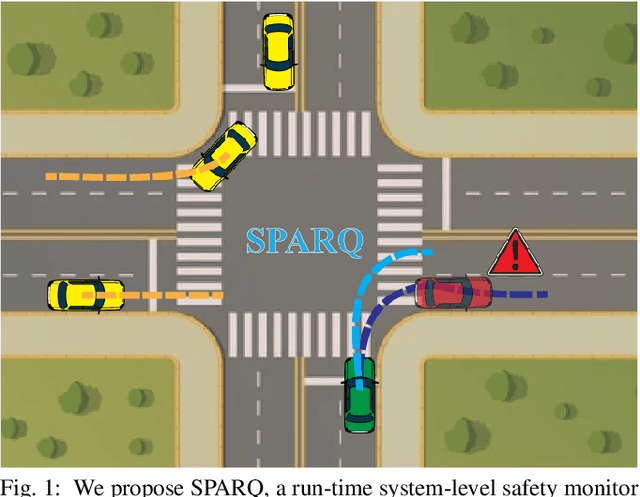
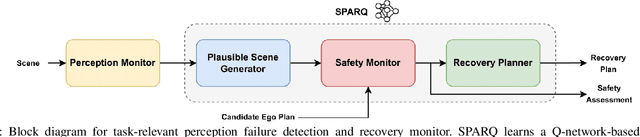
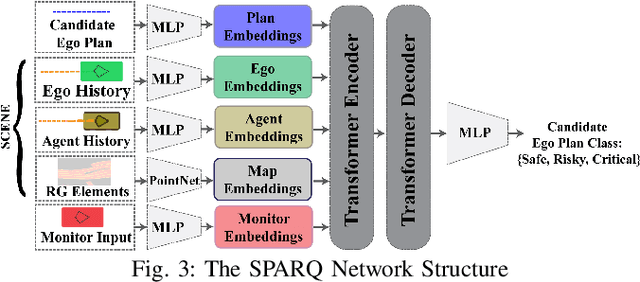
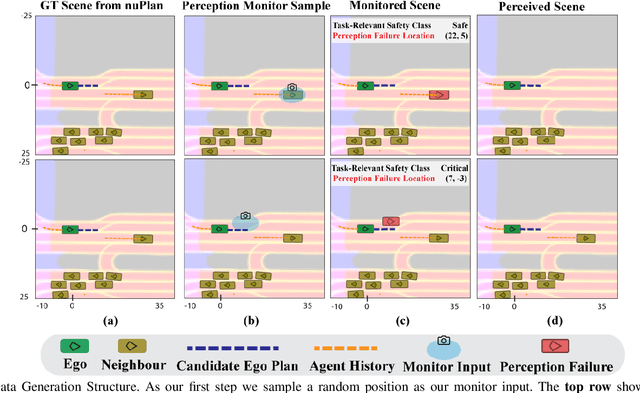
The safety-critical nature of autonomous vehicle (AV) operation necessitates development of task-relevant algorithms that can reason about safety at the system level and not just at the component level. To reason about the impact of a perception failure on the entire system performance, such task-relevant algorithms must contend with various challenges: complexity of AV stacks, high uncertainty in the operating environments, and the need for real-time performance. To overcome these challenges, in this work, we introduce a Q-network called SPARQ (abbreviation for Safety evaluation for Perception And Recovery Q-network) that evaluates the safety of a plan generated by a planning algorithm, accounting for perception failures that the planning process may have overlooked. This Q-network can be queried during system runtime to assess whether a proposed plan is safe for execution or poses potential safety risks. If a violation is detected, the network can then recommend a corrective plan while accounting for the perceptual failure. We validate our algorithm using the NuPlan-Vegas dataset, demonstrating its ability to handle cases where a perception failure compromises a proposed plan while the corrective plan remains safe. We observe an overall accuracy and recall of 90% while sustaining a frequency of 42Hz on the unseen testing dataset. We compare our performance to a popular reachability-based baseline and analyze some interesting properties of our approach in improving the safety properties of an AV pipeline.