 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStoryState: Agent-Based State Control for Consistent and Editable Storybooks
Feb 01, 2026Large multimodal models have enabled one-click storybook generation, where users provide a short description and receive a multi-page illustrated story. However, the underlying story state, such as characters, world settings, and page-level objects, remains implicit, making edits coarse-grained and often breaking visual consistency. We present StoryState, an agent-based orchestration layer that introduces an explicit and editable story state on top of training-free text-to-image generation. StoryState represents each story as a structured object composed of a character sheet, global settings, and per-page scene constraints, and employs a small set of LLM agents to maintain this state and derive 1Prompt1Story-style prompts for generation and editing. Operating purely through prompts, StoryState is model-agnostic and compatible with diverse generation backends. System-level experiments on multi-page editing tasks show that StoryState enables localized page edits, improves cross-page consistency, and reduces unintended changes, interaction turns, and editing time compared to 1Prompt1Story, while approaching the one-shot consistency of Gemini Storybook. Code is available at https://github.com/YuZhenyuLindy/StoryState
ReDiStory: Region-Disentangled Diffusion for Consistent Visual Story Generation
Feb 01, 2026Generating coherent visual stories requires maintaining subject identity across multiple images while preserving frame-specific semantics. Recent training-free methods concatenate identity and frame prompts into a unified representation, but this often introduces inter-frame semantic interference that weakens identity preservation in complex stories. We propose ReDiStory, a training-free framework that improves multi-frame story generation via inference-time prompt embedding reorganization. ReDiStory explicitly decomposes text embeddings into identity-related and frame-specific components, then decorrelates frame embeddings by suppressing shared directions across frames. This reduces cross-frame interference without modifying diffusion parameters or requiring additional supervision. Under identical diffusion backbones and inference settings, ReDiStory improves identity consistency while maintaining prompt fidelity. Experiments on the ConsiStory+ benchmark show consistent gains over 1Prompt1Story on multiple identity consistency metrics. Code is available at: https://github.com/YuZhenyuLindy/ReDiStory
From Orthomosaics to Raw UAV Imagery: Enhancing Palm Detection and Crown-Center Localization
Sep 15, 2025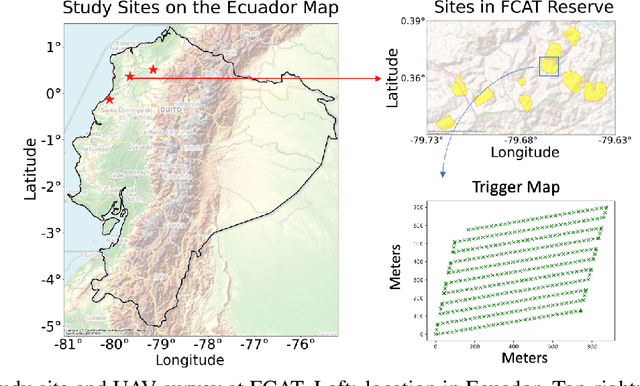
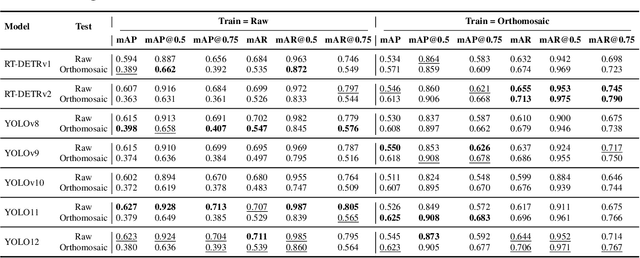
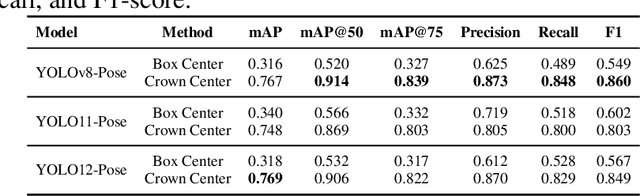
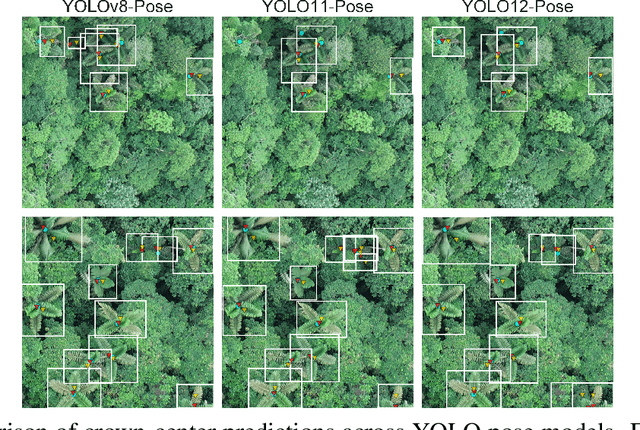
Accurate mapping of individual trees is essential for ecological monitoring and forest management. Orthomosaic imagery from unmanned aerial vehicles (UAVs) is widely used, but stitching artifacts and heavy preprocessing limit its suitability for field deployment. This study explores the use of raw UAV imagery for palm detection and crown-center localization in tropical forests. Two research questions are addressed: (1) how detection performance varies across orthomosaic and raw imagery, including within-domain and cross-domain transfer, and (2) to what extent crown-center annotations improve localization accuracy beyond bounding-box centroids. Using state-of-the-art detectors and keypoint models, we show that raw imagery yields superior performance in deployment-relevant scenarios, while orthomosaics retain value for robust cross-domain generalization. Incorporating crown-center annotations in training further improves localization and provides precise tree positions for downstream ecological analyses. These findings offer practical guidance for UAV-based biodiversity and conservation monitoring.
Cott-ADNet: Lightweight Real-Time Cotton Boll and Flower Detection Under Field Conditions
Sep 15, 2025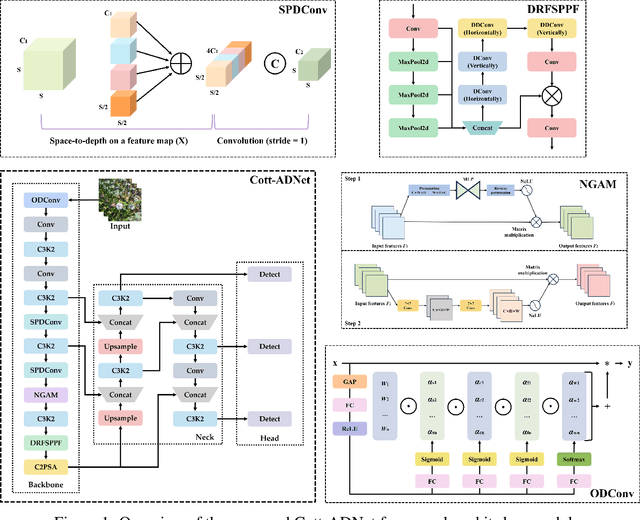
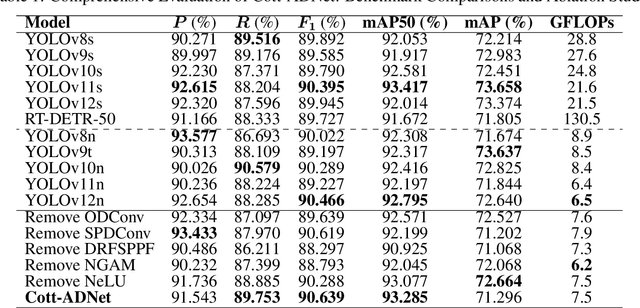
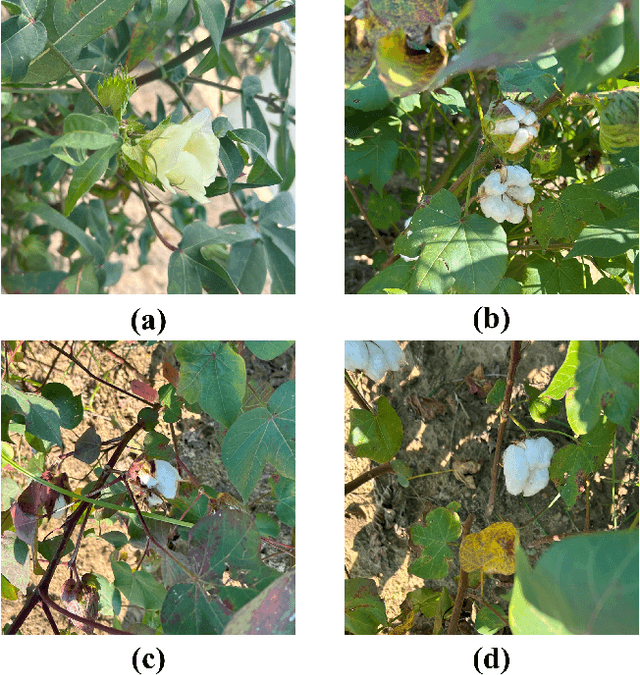
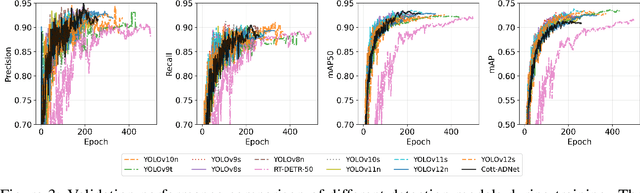
Cotton is one of the most important natural fiber crops worldwide, yet harvesting remains limited by labor-intensive manual picking, low efficiency, and yield losses from missing the optimal harvest window. Accurate recognition of cotton bolls and their maturity is therefore essential for automation, yield estimation, and breeding research. We propose Cott-ADNet, a lightweight real-time detector tailored to cotton boll and flower recognition under complex field conditions. Building on YOLOv11n, Cott-ADNet enhances spatial representation and robustness through improved convolutional designs, while introducing two new modules: a NeLU-enhanced Global Attention Mechanism to better capture weak and low-contrast features, and a Dilated Receptive Field SPPF to expand receptive fields for more effective multi-scale context modeling at low computational cost. We curate a labeled dataset of 4,966 images, and release an external validation set of 1,216 field images to support future research. Experiments show that Cott-ADNet achieves 91.5% Precision, 89.8% Recall, 93.3% mAP50, 71.3% mAP, and 90.6% F1-Score with only 7.5 GFLOPs, maintaining stable performance under multi-scale and rotational variations. These results demonstrate Cott-ADNet as an accurate and efficient solution for in-field deployment, and thus provide a reliable basis for automated cotton harvesting and high-throughput phenotypic analysis. Code and dataset is available at https://github.com/SweefongWong/Cott-ADNet.
Blind Restoration of High-Resolution Ultrasound Video
May 20, 2025Ultrasound imaging is widely applied in clinical practice, yet ultrasound videos often suffer from low signal-to-noise ratios (SNR) and limited resolutions, posing challenges for diagnosis and analysis. Variations in equipment and acquisition settings can further exacerbate differences in data distribution and noise levels, reducing the generalizability of pre-trained models. This work presents a self-supervised ultrasound video super-resolution algorithm called Deep Ultrasound Prior (DUP). DUP employs a video-adaptive optimization process of a neural network that enhances the resolution of given ultrasound videos without requiring paired training data while simultaneously removing noise. Quantitative and visual evaluations demonstrate that DUP outperforms existing super-resolution algorithms, leading to substantial improvements for downstream applications.
A Local Perspective-based Model for Overlapping Community Detection
Mar 27, 2025
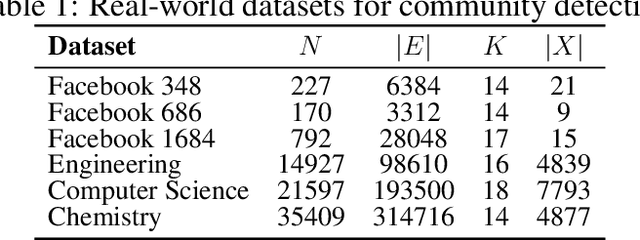


Community detection, which identifies densely connected node clusters with sparse between-group links, is vital for analyzing network structure and function in real-world systems. Most existing community detection methods based on GCNs primarily focus on node-level information while overlooking community-level features, leading to performance limitations on large-scale networks. To address this issue, we propose LQ-GCN, an overlapping community detection model from a local community perspective. LQ-GCN employs a Bernoulli-Poisson model to construct a community affiliation matrix and form an end-to-end detection framework. By adopting local modularity as the objective function, the model incorporates local community information to enhance the quality and accuracy of clustering results. Additionally, the conventional GCNs architecture is optimized to improve the model capability in identifying overlapping communities in large-scale networks. Experimental results demonstrate that LQ-GCN achieves up to a 33% improvement in Normalized Mutual Information (NMI) and a 26.3% improvement in Recall compared to baseline models across multiple real-world benchmark datasets.
Detection and Geographic Localization of Natural Objects in the Wild: A Case Study on Palms
Feb 18, 2025



Palms are ecologically and economically indicators of tropical forest health, biodiversity, and human impact that support local economies and global forest product supply chains. While palm detection in plantations is well-studied, efforts to map naturally occurring palms in dense forests remain limited by overlapping crowns, uneven shading, and heterogeneous landscapes. We develop PRISM (Processing, Inference, Segmentation, and Mapping), a flexible pipeline for detecting and localizing palms in dense tropical forests using large orthomosaic images. Orthomosaics are created from thousands of aerial images and spanning several to hundreds of gigabytes. Our contributions are threefold. First, we construct a large UAV-derived orthomosaic dataset collected across 21 ecologically diverse sites in western Ecuador, annotated with 8,830 bounding boxes and 5,026 palm center points. Second, we evaluate multiple state-of-the-art object detectors based on efficiency and performance, integrating zero-shot SAM 2 as the segmentation backbone, and refining the results for precise geographic mapping. Third, we apply calibration methods to align confidence scores with IoU and explore saliency maps for feature explainability. Though optimized for palms, PRISM is adaptable for identifying other natural objects, such as eastern white pines. Future work will explore transfer learning for lower-resolution datasets (0.5 to 1m).
Bilateral Signal Warping for Left Ventricular Hypertrophy Diagnosis
Nov 13, 2024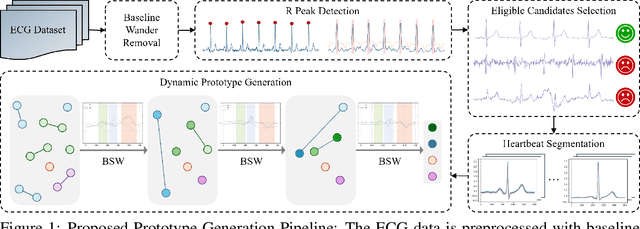
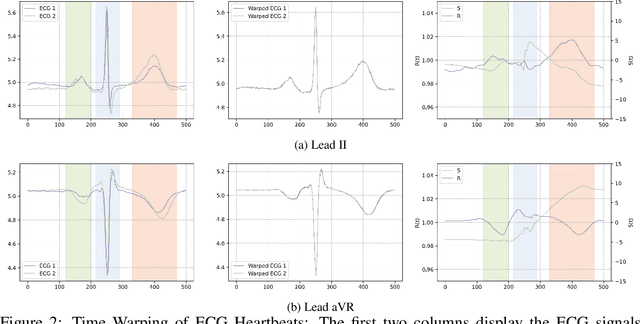
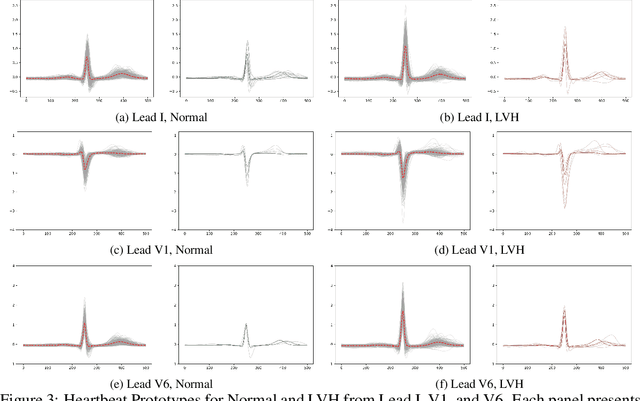
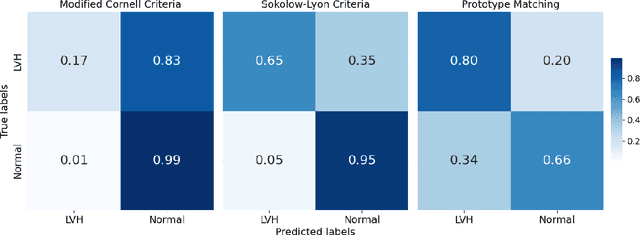
Left Ventricular Hypertrophy (LVH) is a major cardiovascular risk factor, linked to heart failure, arrhythmia, and sudden cardiac death, often resulting from chronic stress like hypertension. Electrocardiography (ECG), while varying in sensitivity, is widely accessible and cost-effective for detecting LVH-related morphological changes. This work introduces a bilateral signal warping (BSW) approach to improve ECG-based LVH diagnosis. Our method creates a library of heartbeat prototypes from patients with consistent ECG patterns. After preprocessing to eliminate baseline wander and detect R peaks, we apply BSW to cluster heartbeats, generating prototypes for both normal and LVH classes. We compare each new record to these references to support diagnosis. Experimental results show promising potential for practical application in clinical settings.
Real-Time Localization and Bimodal Point Pattern Analysis of Palms Using UAV Imagery
Oct 14, 2024



Understanding the spatial distribution of palms within tropical forests is essential for effective ecological monitoring, conservation strategies, and the sustainable integration of natural forest products into local and global supply chains. However, the analysis of remotely sensed data in these environments faces significant challenges, such as overlapping palm and tree crowns, uneven shading across the canopy surface, and the heterogeneous nature of the forest landscapes, which often affect the performance of palm detection and segmentation algorithms. To overcome these issues, we introduce PalmDSNet, a deep learning framework for real-time detection, segmentation, and counting of canopy palms. Additionally, we employ a bimodal reproduction algorithm that simulates palm spatial propagation to further enhance the understanding of these point patterns using PalmDSNet's results. We used UAV-captured imagery to create orthomosaics from 21 sites across western Ecuadorian tropical forests, covering a gradient from the everwet Choc\'o forests near Colombia to the drier forests of southwestern Ecuador. Expert annotations were used to create a comprehensive dataset, including 7,356 bounding boxes on image patches and 7,603 palm centers across five orthomosaics, encompassing a total area of 449 hectares. By combining PalmDSNet with the bimodal reproduction algorithm, which optimizes parameters for both local and global spatial variability, we effectively simulate the spatial distribution of palms in diverse and dense tropical environments, validating its utility for advanced applications in tropical forest monitoring and remote sensing analysis.
PalmProbNet: A Probabilistic Approach to Understanding Palm Distributions in Ecuadorian Tropical Forest via Transfer Learning
Mar 05, 2024Palms play an outsized role in tropical forests and are important resources for humans and wildlife. A central question in tropical ecosystems is understanding palm distribution and abundance. However, accurately identifying and localizing palms in geospatial imagery presents significant challenges due to dense vegetation, overlapping canopies, and variable lighting conditions in mixed-forest landscapes. Addressing this, we introduce PalmProbNet, a probabilistic approach utilizing transfer learning to analyze high-resolution UAV-derived orthomosaic imagery, enabling the detection of palm trees within the dense canopy of the Ecuadorian Rainforest. This approach represents a substantial advancement in automated palm detection, effectively pinpointing palm presence and locality in mixed tropical rainforests. Our process begins by generating an orthomosaic image from UAV images, from which we extract and label palm and non-palm image patches in two distinct sizes. These patches are then used to train models with an identical architecture, consisting of an unaltered pre-trained ResNet-18 and a Multilayer Perceptron (MLP) with specifically trained parameters. Subsequently, PalmProbNet employs a sliding window technique on the landscape orthomosaic, using both small and large window sizes to generate a probability heatmap. This heatmap effectively visualizes the distribution of palms, showcasing the scalability and adaptability of our approach in various forest densities. Despite the challenging terrain, our method demonstrated remarkable performance, achieving an accuracy of 97.32% and a Cohen's kappa of 94.59% in testing.