 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Orthomosaics to Raw UAV Imagery: Enhancing Palm Detection and Crown-Center Localization
Sep 15, 2025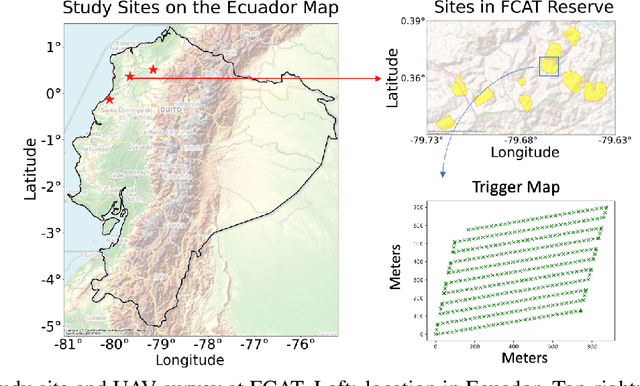
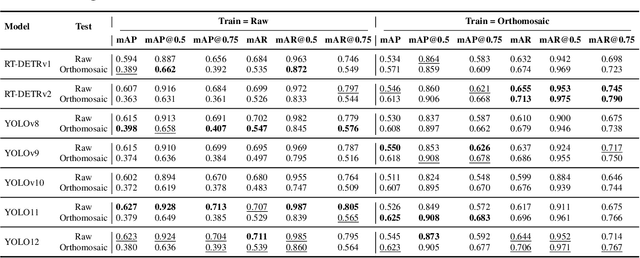
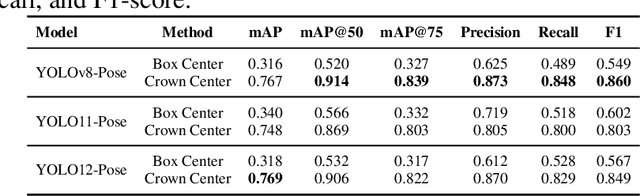
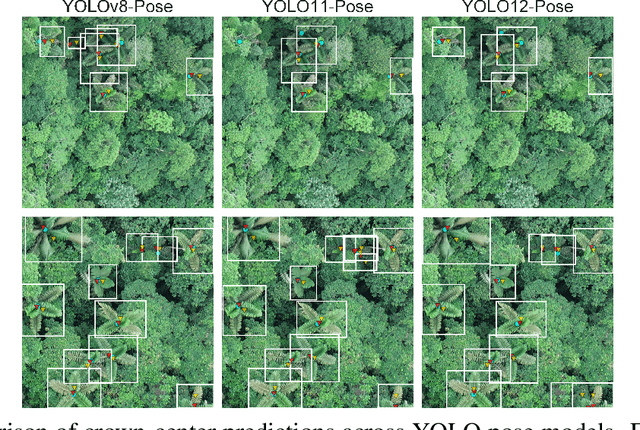
Accurate mapping of individual trees is essential for ecological monitoring and forest management. Orthomosaic imagery from unmanned aerial vehicles (UAVs) is widely used, but stitching artifacts and heavy preprocessing limit its suitability for field deployment. This study explores the use of raw UAV imagery for palm detection and crown-center localization in tropical forests. Two research questions are addressed: (1) how detection performance varies across orthomosaic and raw imagery, including within-domain and cross-domain transfer, and (2) to what extent crown-center annotations improve localization accuracy beyond bounding-box centroids. Using state-of-the-art detectors and keypoint models, we show that raw imagery yields superior performance in deployment-relevant scenarios, while orthomosaics retain value for robust cross-domain generalization. Incorporating crown-center annotations in training further improves localization and provides precise tree positions for downstream ecological analyses. These findings offer practical guidance for UAV-based biodiversity and conservation monitoring.
PalmProbNet: A Probabilistic Approach to Understanding Palm Distributions in Ecuadorian Tropical Forest via Transfer Learning
Mar 05, 2024Palms play an outsized role in tropical forests and are important resources for humans and wildlife. A central question in tropical ecosystems is understanding palm distribution and abundance. However, accurately identifying and localizing palms in geospatial imagery presents significant challenges due to dense vegetation, overlapping canopies, and variable lighting conditions in mixed-forest landscapes. Addressing this, we introduce PalmProbNet, a probabilistic approach utilizing transfer learning to analyze high-resolution UAV-derived orthomosaic imagery, enabling the detection of palm trees within the dense canopy of the Ecuadorian Rainforest. This approach represents a substantial advancement in automated palm detection, effectively pinpointing palm presence and locality in mixed tropical rainforests. Our process begins by generating an orthomosaic image from UAV images, from which we extract and label palm and non-palm image patches in two distinct sizes. These patches are then used to train models with an identical architecture, consisting of an unaltered pre-trained ResNet-18 and a Multilayer Perceptron (MLP) with specifically trained parameters. Subsequently, PalmProbNet employs a sliding window technique on the landscape orthomosaic, using both small and large window sizes to generate a probability heatmap. This heatmap effectively visualizes the distribution of palms, showcasing the scalability and adaptability of our approach in various forest densities. Despite the challenging terrain, our method demonstrated remarkable performance, achieving an accuracy of 97.32% and a Cohen's kappa of 94.59% in testing.
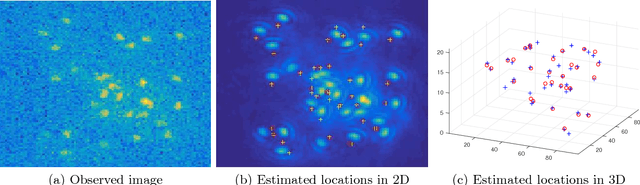
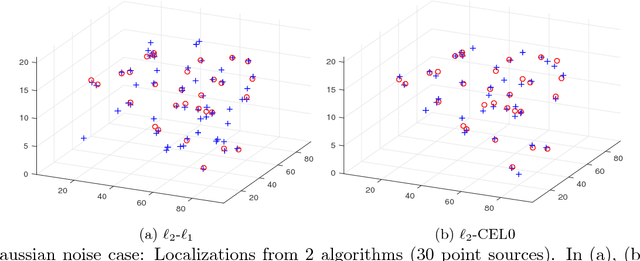
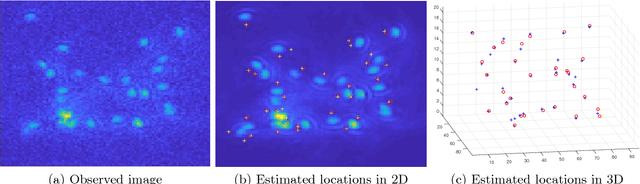
Joint 3D Localization and Classification of Space Debris using a Multispectral Rotating Point Spread Function
Jun 11, 2019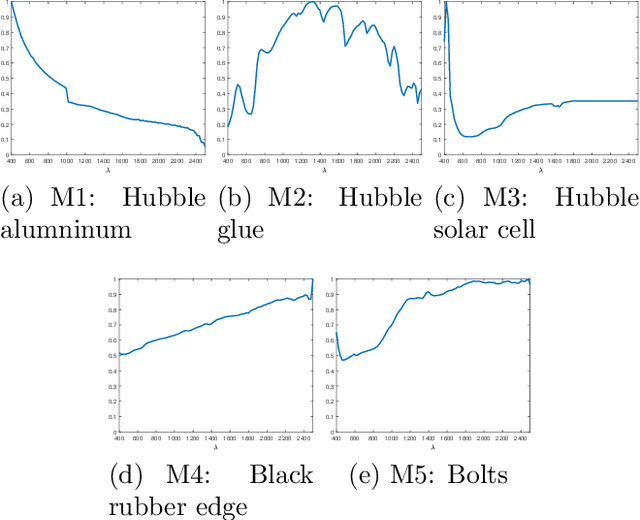
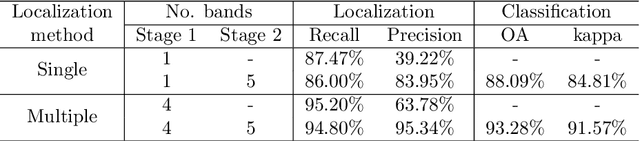
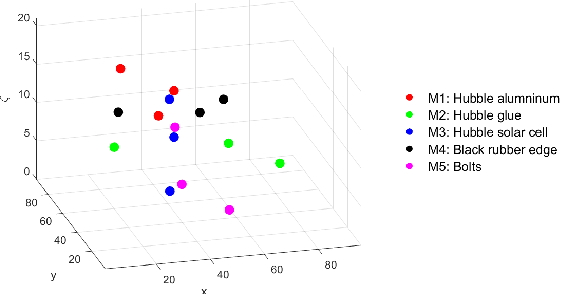
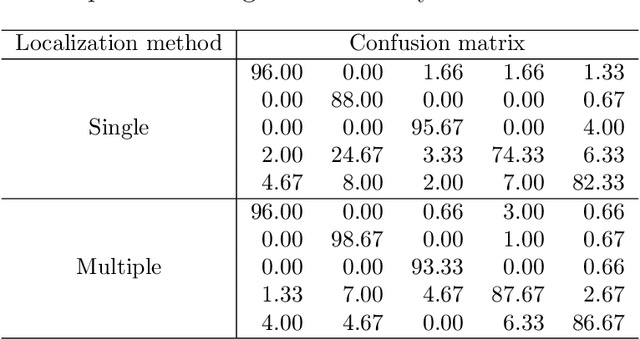
We consider the problem of joint three-dimensional (3D) localization and material classification of unresolved space debris using a multispectral rotating point spread function (RPSF). The use of RPSF allows one to estimate the 3D locations of point sources from their rotated images acquired by a single 2D sensor array, since the amount of rotation of each source image about its x, y location depends on its axial distance z. Using multi-spectral images, with one RPSF per spectral band, we are able not only to localize the 3D positions of the space debris but also classify their material composition. We propose a three-stage method for achieving joint localization and classification. In Stage 1, we adopt an optimization scheme for localization in which the spectral signature of each material is assumed to be uniform, which significantly improves efficiency and yields better localization results than possible with a single spectral band. In Stage 2, we estimate the spectral signature and refine the localization result via an alternating approach. We process classification in the final stage. Both Poisson noise and Gaussian noise models are considered, and the implementation of each is discussed. Numerical tests using multispectral data from NASA show the efficiency of our three-stage approach and illustrate the improvement of point source localization and spectral classification from using multiple bands over a single band.
Novel Sparse Recovery Algorithms for 3D Debris Localization using Rotating Point Spread Function Imagery
Sep 27, 2018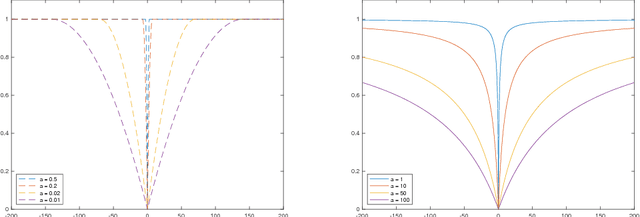
An optical imager that exploits off-center image rotation to encode both the lateral and depth coordinates of point sources in a single snapshot can perform 3D localization and tracking of space debris. When actively illuminated, unresolved space debris, which can be regarded as a swarm of point sources, can scatter a fraction of laser irradiance back into the imaging sensor. Determining the source locations and fluxes is a large-scale sparse 3D inverse problem, for which we have developed efficient and effective algorithms based on sparse recovery using non-convex optimization. Numerical simulations illustrate the efficiency and stability of the algorithms.