 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePiLocNet: Physics-informed neural network on 3D localization with rotating point spread function
Oct 17, 2024



For the 3D localization problem using point spread function (PSF) engineering, we propose a novel enhancement of our previously introduced localization neural network, LocNet. The improved network is a physics-informed neural network (PINN) that we call PiLocNet. Previous works on the localization problem may be categorized separately into model-based optimization and neural network approaches. Our PiLocNet combines the unique strengths of both approaches by incorporating forward-model-based information into the network via a data-fitting loss term that constrains the neural network to yield results that are physically sensible. We additionally incorporate certain regularization terms from the variational method, which further improves the robustness of the network in the presence of image noise, as we show for the Poisson and Gaussian noise models. This framework accords interpretability to the neural network, and the results we obtain show its superiority. Although the paper focuses on the use of single-lobe rotating PSF to encode the full 3D source location, we expect the method to be widely applicable to other PSFs and imaging problems that are constrained by known forward processes.
Joint 3D Localization and Classification of Space Debris using a Multispectral Rotating Point Spread Function
Jun 11, 2019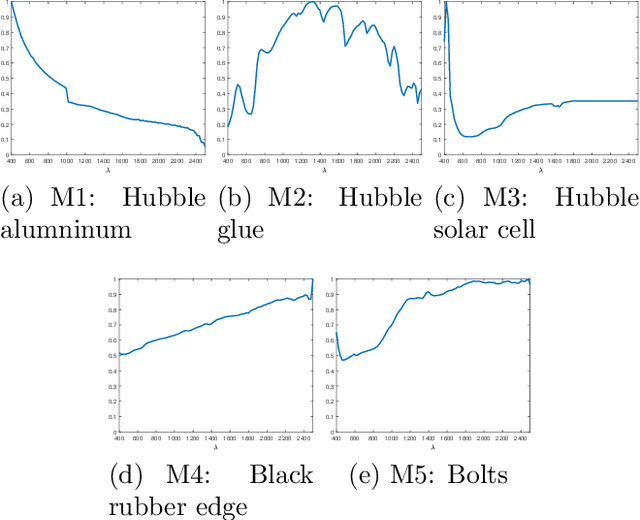
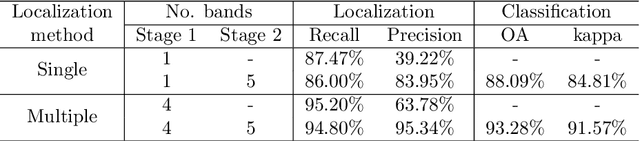
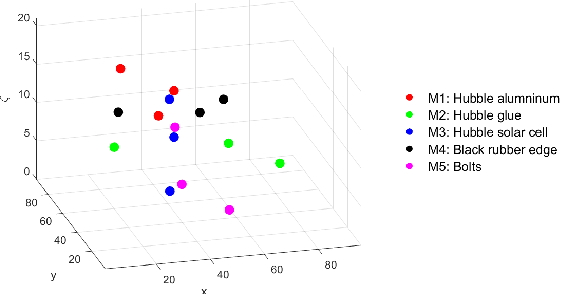
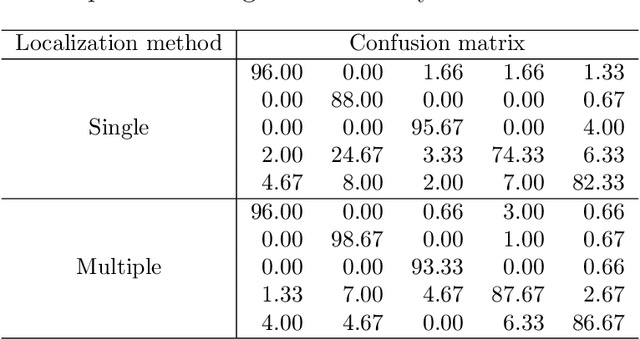
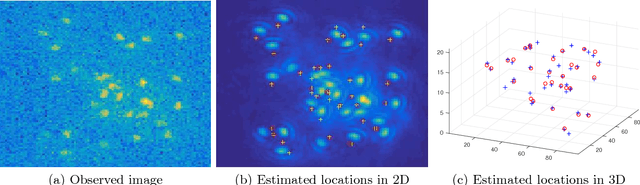
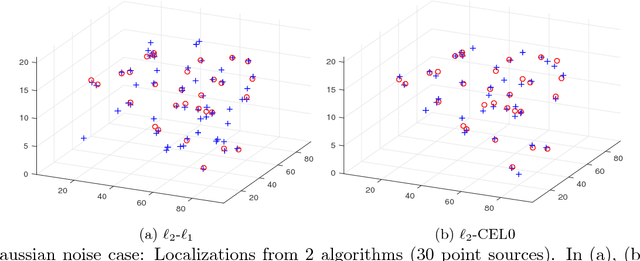
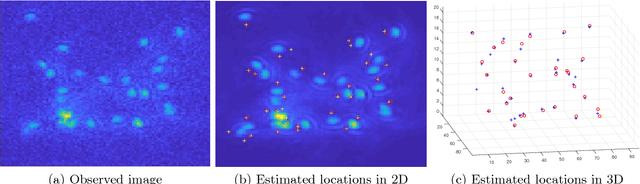
We consider the problem of joint three-dimensional (3D) localization and material classification of unresolved space debris using a multispectral rotating point spread function (RPSF). The use of RPSF allows one to estimate the 3D locations of point sources from their rotated images acquired by a single 2D sensor array, since the amount of rotation of each source image about its x, y location depends on its axial distance z. Using multi-spectral images, with one RPSF per spectral band, we are able not only to localize the 3D positions of the space debris but also classify their material composition. We propose a three-stage method for achieving joint localization and classification. In Stage 1, we adopt an optimization scheme for localization in which the spectral signature of each material is assumed to be uniform, which significantly improves efficiency and yields better localization results than possible with a single spectral band. In Stage 2, we estimate the spectral signature and refine the localization result via an alternating approach. We process classification in the final stage. Both Poisson noise and Gaussian noise models are considered, and the implementation of each is discussed. Numerical tests using multispectral data from NASA show the efficiency of our three-stage approach and illustrate the improvement of point source localization and spectral classification from using multiple bands over a single band.
Novel Sparse Recovery Algorithms for 3D Debris Localization using Rotating Point Spread Function Imagery
Sep 27, 2018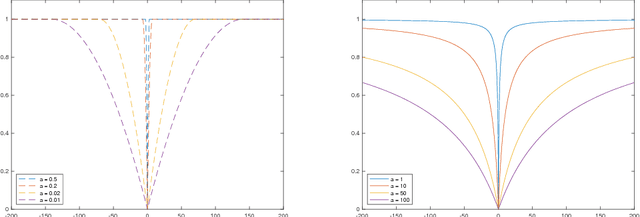
An optical imager that exploits off-center image rotation to encode both the lateral and depth coordinates of point sources in a single snapshot can perform 3D localization and tracking of space debris. When actively illuminated, unresolved space debris, which can be regarded as a swarm of point sources, can scatter a fraction of laser irradiance back into the imaging sensor. Determining the source locations and fluxes is a large-scale sparse 3D inverse problem, for which we have developed efficient and effective algorithms based on sparse recovery using non-convex optimization. Numerical simulations illustrate the efficiency and stability of the algorithms.