 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePF3Det: A Prompted Foundation Feature Assisted Visual LiDAR 3D Detector
Apr 04, 2025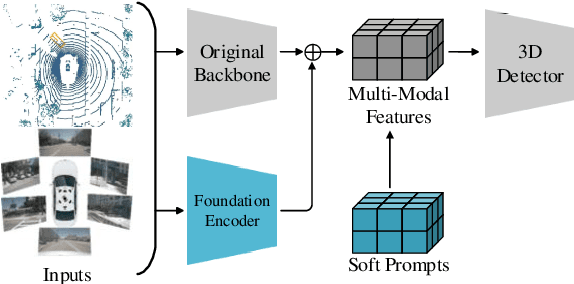
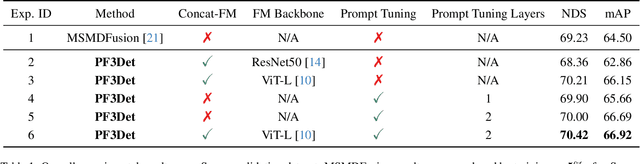
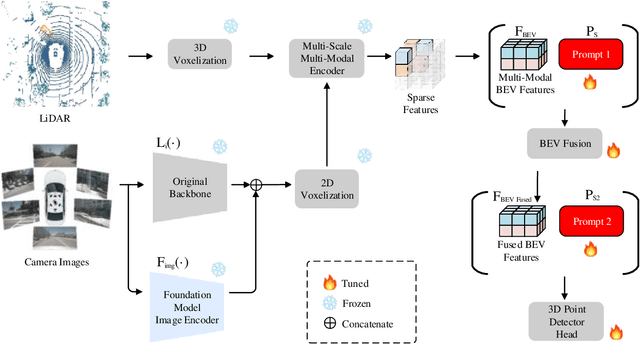

3D object detection is crucial for autonomous driving, leveraging both LiDAR point clouds for precise depth information and camera images for rich semantic information. Therefore, the multi-modal methods that combine both modalities offer more robust detection results. However, efficiently fusing LiDAR points and images remains challenging due to the domain gaps. In addition, the performance of many models is limited by the amount of high quality labeled data, which is expensive to create. The recent advances in foundation models, which use large-scale pre-training on different modalities, enable better multi-modal fusion. Combining the prompt engineering techniques for efficient training, we propose the Prompted Foundational 3D Detector (PF3Det), which integrates foundation model encoders and soft prompts to enhance LiDAR-camera feature fusion. PF3Det achieves the state-of-the-art results under limited training data, improving NDS by 1.19% and mAP by 2.42% on the nuScenes dataset, demonstrating its efficiency in 3D detection.
Robust 3D Point Clouds Classification based on Declarative Defenders
Oct 13, 2024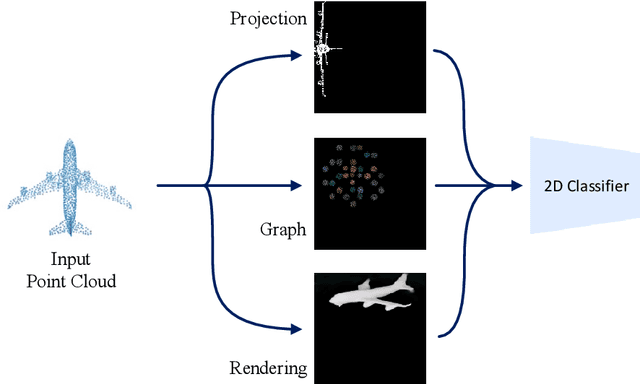
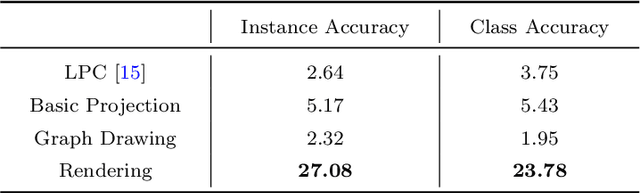


3D point cloud classification requires distinct models from 2D image classification due to the divergent characteristics of the respective input data. While 3D point clouds are unstructured and sparse, 2D images are structured and dense. Bridging the domain gap between these two data types is a non-trivial challenge to enable model interchangeability. Recent research using Lattice Point Classifier (LPC) highlights the feasibility of cross-domain applicability. However, the lattice projection operation in LPC generates 2D images with disconnected projected pixels. In this paper, we explore three distinct algorithms for mapping 3D point clouds into 2D images. Through extensive experiments, we thoroughly examine and analyze their performance and defense mechanisms. Leveraging current large foundation models, we scrutinize the feature disparities between regular 2D images and projected 2D images. The proposed approaches demonstrate superior accuracy and robustness against adversarial attacks. The generative model-based mapping algorithms yield regular 2D images, further minimizing the domain gap from regular 2D classification tasks. The source code is available at https://github.com/KaidongLi/pytorch-LatticePointClassifier.git.
Aphid Cluster Recognition and Detection in the Wild Using Deep Learning Models
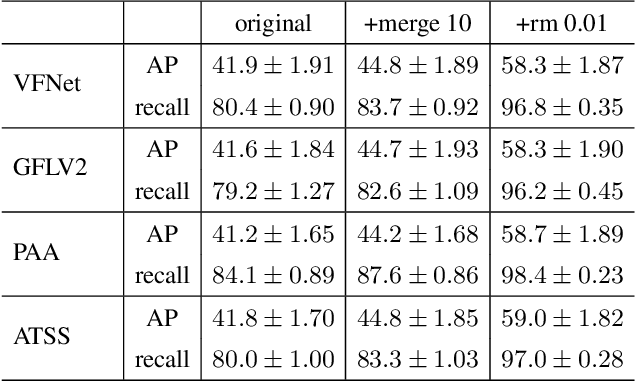
Aug 10, 2023Aphid infestation poses a significant threat to crop production, rural communities, and global food security. While chemical pest control is crucial for maximizing yields, applying chemicals across entire fields is both environmentally unsustainable and costly. Hence, precise localization and management of aphids are essential for targeted pesticide application. The paper primarily focuses on using deep learning models for detecting aphid clusters. We propose a novel approach for estimating infection levels by detecting aphid clusters. To facilitate this research, we have captured a large-scale dataset from sorghum fields, manually selected 5,447 images containing aphids, and annotated each individual aphid cluster within these images. To facilitate the use of machine learning models, we further process the images by cropping them into patches, resulting in a labeled dataset comprising 151,380 image patches. Then, we implemented and compared the performance of four state-of-the-art object detection models (VFNet, GFLV2, PAA, and ATSS) on the aphid dataset. Extensive experimental results show that all models yield stable similar performance in terms of average precision and recall. We then propose to merge close neighboring clusters and remove tiny clusters caused by cropping, and the performance is further boosted by around 17%. The study demonstrates the feasibility of automatically detecting and managing insects using machine learning models. The labeled dataset will be made openly available to the research community.
On the Real-Time Semantic Segmentation of Aphid Clusters in the Wild
Jul 17, 2023
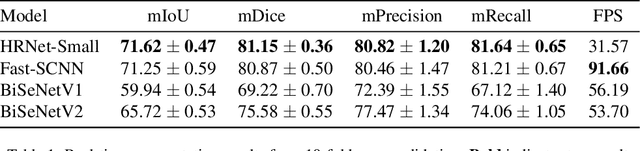
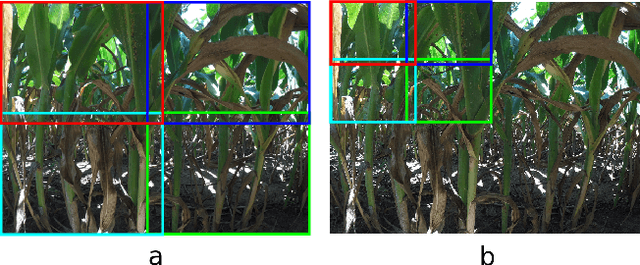
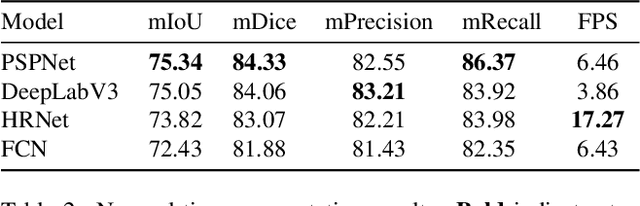
Aphid infestations can cause extensive damage to wheat and sorghum fields and spread plant viruses, resulting in significant yield losses in agriculture. To address this issue, farmers often rely on chemical pesticides, which are inefficiently applied over large areas of fields. As a result, a considerable amount of pesticide is wasted on areas without pests, while inadequate amounts are applied to areas with severe infestations. The paper focuses on the urgent need for an intelligent autonomous system that can locate and spray infestations within complex crop canopies, reducing pesticide use and environmental impact. We have collected and labeled a large aphid image dataset in the field, and propose the use of real-time semantic segmentation models to segment clusters of aphids. A multiscale dataset is generated to allow for learning the clusters at different scales. We compare the segmentation speeds and accuracy of four state-of-the-art real-time semantic segmentation models on the aphid cluster dataset, benchmarking them against nonreal-time models. The study results show the effectiveness of a real-time solution, which can reduce inefficient pesticide use and increase crop yields, paving the way towards an autonomous pest detection system.
A New Dataset and Comparative Study for Aphid Cluster Detection
Jul 12, 2023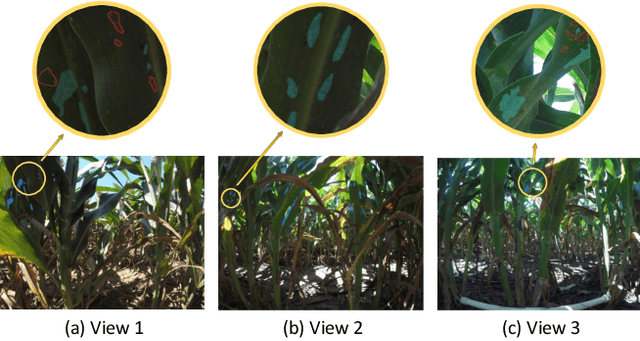

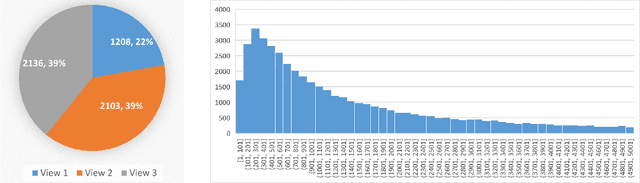
Aphids are one of the main threats to crops, rural families, and global food security. Chemical pest control is a necessary component of crop production for maximizing yields, however, it is unnecessary to apply the chemical approaches to the entire fields in consideration of the environmental pollution and the cost. Thus, accurately localizing the aphid and estimating the infestation level is crucial to the precise local application of pesticides. Aphid detection is very challenging as each individual aphid is really small and all aphids are crowded together as clusters. In this paper, we propose to estimate the infection level by detecting aphid clusters. We have taken millions of images in the sorghum fields, manually selected 5,447 images that contain aphids, and annotated each aphid cluster in the image. To use these images for machine learning models, we crop the images into patches and created a labeled dataset with over 151,000 image patches. Then, we implement and compare the performance of four state-of-the-art object detection models.
Robust Structured Declarative Classifiers for 3D Point Clouds: Defending Adversarial Attacks with Implicit Gradients
Mar 29, 2022



Deep neural networks for 3D point cloud classification, such as PointNet, have been demonstrated to be vulnerable to adversarial attacks. Current adversarial defenders often learn to denoise the (attacked) point clouds by reconstruction, and then feed them to the classifiers as input. In contrast to the literature, we propose a family of robust structured declarative classifiers for point cloud classification, where the internal constrained optimization mechanism can effectively defend adversarial attacks through implicit gradients. Such classifiers can be formulated using a bilevel optimization framework. We further propose an effective and efficient instantiation of our approach, namely, Lattice Point Classifier (LPC), based on structured sparse coding in the permutohedral lattice and 2D convolutional neural networks (CNNs) that is end-to-end trainable. We demonstrate state-of-the-art robust point cloud classification performance on ModelNet40 and ScanNet under seven different attackers. For instance, we achieve 89.51% and 83.16% test accuracy on each dataset under the recent JGBA attacker that outperforms DUP-Net and IF-Defense with PointNet by ~70%. Demo code is available at https://zhang-vislab.github.io.
Dilated Continuous Random Field for Semantic Segmentation
Feb 01, 2022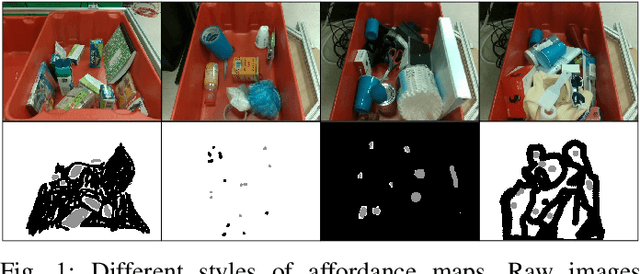

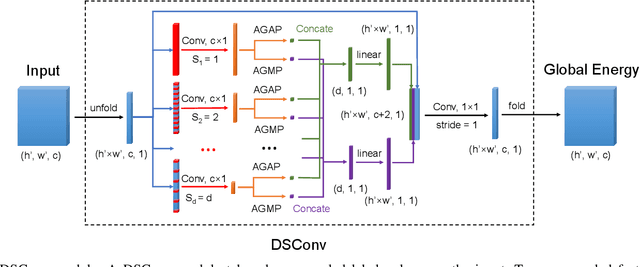
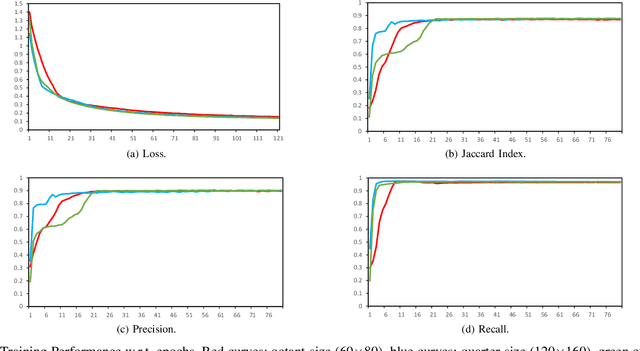
Mean field approximation methodology has laid the foundation of modern Continuous Random Field (CRF) based solutions for the refinement of semantic segmentation. In this paper, we propose to relax the hard constraint of mean field approximation - minimizing the energy term of each node from probabilistic graphical model, by a global optimization with the proposed dilated sparse convolution module (DSConv). In addition, adaptive global average-pooling and adaptive global max-pooling are implemented as replacements of fully connected layers. In order to integrate DSConv, we design an end-to-end, time-efficient DilatedCRF pipeline. The unary energy term is derived either from pre-softmax and post-softmax features, or the predicted affordance map using a conventional classifier, making it easier to implement DilatedCRF for varieties of classifiers. We also present superior experimental results of proposed approach on the suction dataset comparing to other CRF-based approaches.
SGNet: A Super-class Guided Network for Image Classification and Object Detection
Apr 26, 2021
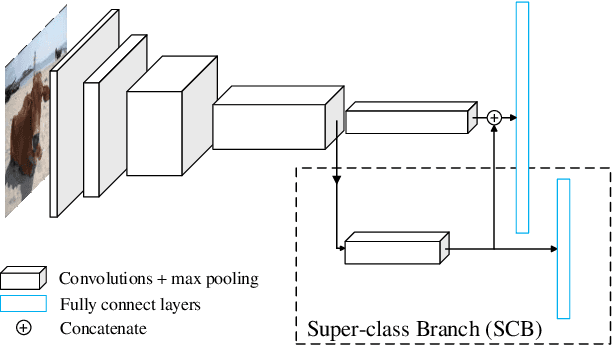

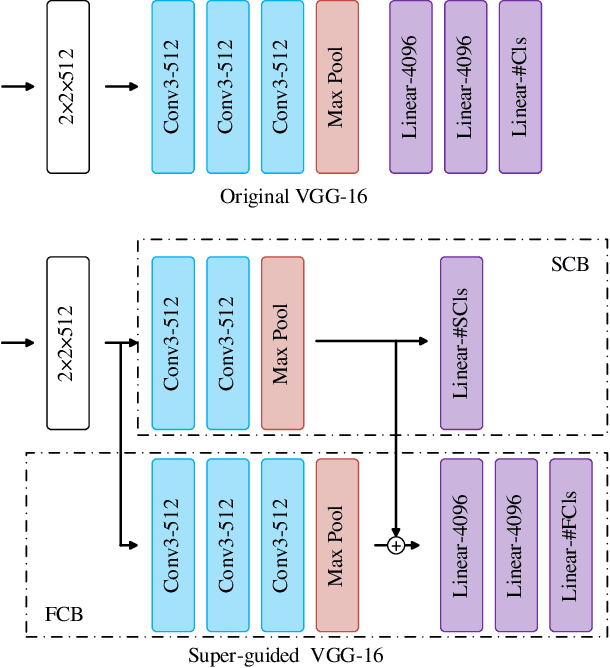
Most classification models treat different object classes in parallel and the misclassifications between any two classes are treated equally. In contrast, human beings can exploit high-level information in making a prediction of an unknown object. Inspired by this observation, the paper proposes a super-class guided network (SGNet) to integrate the high-level semantic information into the network so as to increase its performance in inference. SGNet takes two-level class annotations that contain both super-class and finer class labels. The super-classes are higher-level semantic categories that consist of a certain amount of finer classes. A super-class branch (SCB), trained on super-class labels, is introduced to guide finer class prediction. At the inference time, we adopt two different strategies: Two-step inference (TSI) and direct inference (DI). TSI first predicts the super-class and then makes predictions of the corresponding finer class. On the other hand, DI directly generates predictions from the finer class branch (FCB). Extensive experiments have been performed on CIFAR-100 and MS COCO datasets. The experimental results validate the proposed approach and demonstrate its superior performance on image classification and object detection.
Colonoscopy Polyp Detection and Classification: Dataset Creation and Comparative Evaluations
Apr 22, 2021



Colorectal cancer (CRC) is one of the most common types of cancer with a high mortality rate. Colonoscopy is the preferred procedure for CRC screening and has proven to be effective in reducing CRC mortality. Thus, a reliable computer-aided polyp detection and classification system can significantly increase the effectiveness of colonoscopy. In this paper, we create an endoscopic dataset collected from various sources and annotate the ground truth of polyp location and classification results with the help of experienced gastroenterologists. The dataset can serve as a benchmark platform to train and evaluate the machine learning models for polyp classification. We have also compared the performance of eight state-of-the-art deep learning-based object detection models. The results demonstrate that deep CNN models are promising in CRC screening. This work can serve as a baseline for future research in polyp detection and classification.
Why Layer-Wise Learning is Hard to Scale-up and a Possible Solution via Accelerated Downsampling
Oct 15, 2020


Layer-wise learning, as an alternative to global back-propagation, is easy to interpret, analyze, and it is memory efficient. Recent studies demonstrate that layer-wise learning can achieve state-of-the-art performance in image classification on various datasets. However, previous studies of layer-wise learning are limited to networks with simple hierarchical structures, and the performance decreases severely for deeper networks like ResNet. This paper, for the first time, reveals the fundamental reason that impedes the scale-up of layer-wise learning is due to the relatively poor separability of the feature space in shallow layers. This argument is empirically verified by controlling the intensity of the convolution operation in local layers. We discover that the poorly-separable features from shallow layers are mismatched with the strong supervision constraint throughout the entire network, making the layer-wise learning sensitive to network depth. The paper further proposes a downsampling acceleration approach to weaken the poor learning of shallow layers so as to transfer the learning emphasis to deep feature space where the separability matches better with the supervision restraint. Extensive experiments have been conducted to verify the new finding and demonstrate the advantages of the proposed downsampling acceleration in improving the performance of layer-wise learning.