 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLetsGo: Large-Scale Garage Modeling and Rendering via LiDAR-Assisted Gaussian Primitives
Apr 15, 2024



Large garages are ubiquitous yet intricate scenes in our daily lives, posing challenges characterized by monotonous colors, repetitive patterns, reflective surfaces, and transparent vehicle glass. Conventional Structure from Motion (SfM) methods for camera pose estimation and 3D reconstruction fail in these environments due to poor correspondence construction. To address these challenges, this paper introduces LetsGo, a LiDAR-assisted Gaussian splatting approach for large-scale garage modeling and rendering. We develop a handheld scanner, Polar, equipped with IMU, LiDAR, and a fisheye camera, to facilitate accurate LiDAR and image data scanning. With this Polar device, we present a GarageWorld dataset consisting of five expansive garage scenes with diverse geometric structures and will release the dataset to the community for further research. We demonstrate that the collected LiDAR point cloud by the Polar device enhances a suite of 3D Gaussian splatting algorithms for garage scene modeling and rendering. We also propose a novel depth regularizer for 3D Gaussian splatting algorithm training, effectively eliminating floating artifacts in rendered images, and a lightweight Level of Detail (LOD) Gaussian renderer for real-time viewing on web-based devices. Additionally, we explore a hybrid representation that combines the advantages of traditional mesh in depicting simple geometry and colors (e.g., walls and the ground) with modern 3D Gaussian representations capturing complex details and high-frequency textures. This strategy achieves an optimal balance between memory performance and rendering quality. Experimental results on our dataset, along with ScanNet++ and KITTI-360, demonstrate the superiority of our method in rendering quality and resource efficiency.
Understanding the Complexity and Its Impact on Testing in ML-Enabled Systems
Jan 10, 2023



Machine learning (ML) enabled systems are emerging with recent breakthroughs in ML. A model-centric view is widely taken by the literature to focus only on the analysis of ML models. However, only a small body of work takes a system view that looks at how ML components work with the system and how they affect software engineering for MLenabled systems. In this paper, we adopt this system view, and conduct a case study on Rasa 3.0, an industrial dialogue system that has been widely adopted by various companies around the world. Our goal is to characterize the complexity of such a largescale ML-enabled system and to understand the impact of the complexity on testing. Our study reveals practical implications for software engineering for ML-enabled systems.
NeReF: Neural Refractive Field for Fluid Surface Reconstruction and Implicit Representation
Mar 08, 2022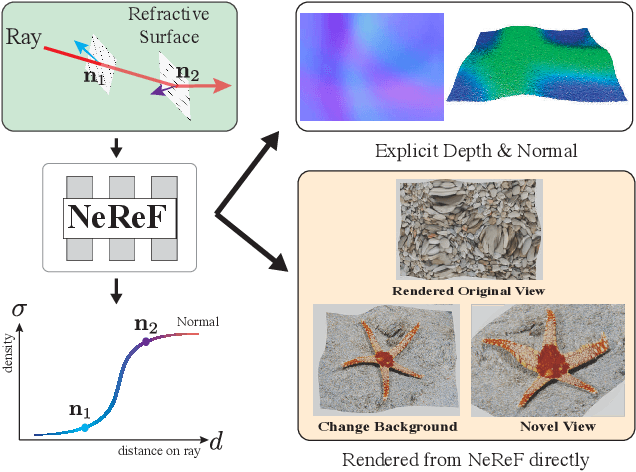
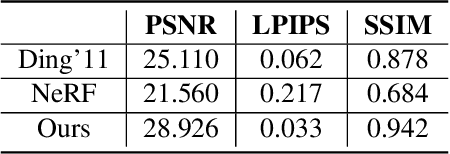
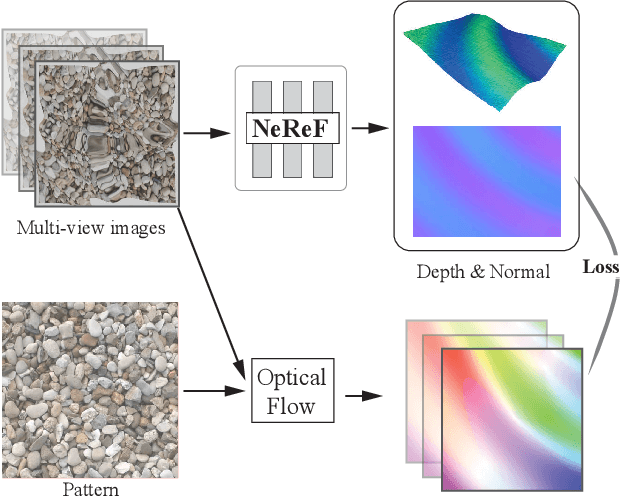
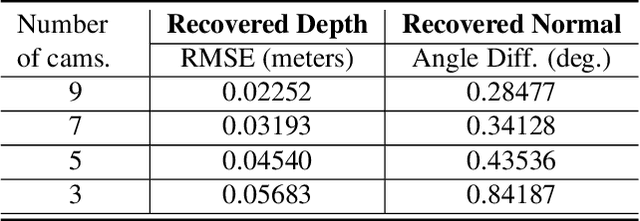
Existing neural reconstruction schemes such as Neural Radiance Field (NeRF) are largely focused on modeling opaque objects. We present a novel neural refractive field(NeReF) to recover wavefront of transparent fluids by simultaneously estimating the surface position and normal of the fluid front. Unlike prior arts that treat the reconstruction target as a single layer of the surface, NeReF is specifically formulated to recover a volumetric normal field with its corresponding density field. A query ray will be refracted by NeReF according to its accumulated refractive point and normal, and we employ the correspondences and uniqueness of refracted ray for NeReF optimization. We show NeReF, as a global optimization scheme, can more robustly tackle refraction distortions detrimental to traditional methods for correspondence matching. Furthermore, the continuous NeReF representation of wavefront enables view synthesis as well as normal integration. We validate our approach on both synthetic and real data and show it is particularly suitable for sparse multi-view acquisition. We hence build a small light field array and experiment on various surface shapes to demonstrate high fidelity NeReF reconstruction.
Characterizing Performance Bugs in Deep Learning Systems
Dec 03, 2021

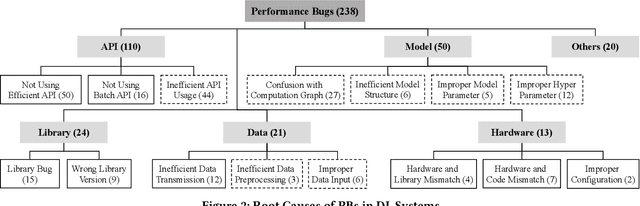

Deep learning (DL) has been increasingly applied to a variety of domains. The programming paradigm shift from traditional systems to DL systems poses unique challenges in engineering DL systems. Performance is one of the challenges, and performance bugs(PBs) in DL systems can cause severe consequences such as excessive resource consumption and financial loss. While bugs in DL systems have been extensively investigated, PBs in DL systems have hardly been explored. To bridge this gap, we present the first comprehensive study to characterize symptoms, root causes, and introducing and exposing stages of PBs in DL systems developed in TensorFLow and Keras, with a total of 238 PBs collected from 225 StackOverflow posts. Our findings shed light on the implications on developing high performance DL systems, and detecting and localizing PBs in DL systems. We also build the first benchmark of 56 PBs in DL systems, and assess the capability of existing approaches in tackling them. Moreover, we develop a static checker DeepPerf to detect three types of PBs, and identify 488 new PBs in 130 GitHub projects.62 and 18 of them have been respectively confirmed and fixed by developers.