 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDOS: Directional Object Separation in Text Embeddings for Multi-Object Image Generation
Oct 16, 2025



Recent progress in text-to-image (T2I) generative models has led to significant improvements in generating high-quality images aligned with text prompts. However, these models still struggle with prompts involving multiple objects, often resulting in object neglect or object mixing. Through extensive studies, we identify four problematic scenarios, Similar Shapes, Similar Textures, Dissimilar Background Biases, and Many Objects, where inter-object relationships frequently lead to such failures. Motivated by two key observations about CLIP embeddings, we propose DOS (Directional Object Separation), a method that modifies three types of CLIP text embeddings before passing them into text-to-image models. Experimental results show that DOS consistently improves the success rate of multi-object image generation and reduces object mixing. In human evaluations, DOS significantly outperforms four competing methods, receiving 26.24%-43.04% more votes across four benchmarks. These results highlight DOS as a practical and effective solution for improving multi-object image generation.
Soft Injection of Task Embeddings Outperforms Prompt-Based In-Context Learning
Jul 28, 2025



In-Context Learning (ICL) enables Large Language Models (LLMs) to perform tasks by conditioning on input-output examples in the prompt, without requiring any update in model parameters. While widely adopted, it remains unclear whether prompting with multiple examples is the most effective and efficient way to convey task information. In this work, we propose Soft Injection of task embeddings. The task embeddings are constructed only once using few-shot ICL prompts and repeatedly used during inference. Soft injection is performed by softly mixing task embeddings with attention head activations using pre-optimized mixing parameters, referred to as soft head-selection parameters. This method not only allows a desired task to be performed without in-prompt demonstrations but also significantly outperforms existing ICL approaches while reducing memory usage and compute cost at inference time. An extensive evaluation is performed across 57 tasks and 12 LLMs, spanning four model families of sizes from 4B to 70B. Averaged across 57 tasks, our method outperforms 10-shot ICL by 10.1%-13.9% across 12 LLMs. Additional analyses show that our method also serves as an insightful tool for analyzing task-relevant roles of attention heads, revealing that task-relevant head positions selected by our method transfer across similar tasks but not across dissimilar ones -- underscoring the task-specific nature of head functionality. Our soft injection method opens a new paradigm for reducing prompt length and improving task performance by shifting task conditioning from the prompt space to the activation space.
ReFlex: Text-Guided Editing of Real Images in Rectified Flow via Mid-Step Feature Extraction and Attention Adaptation
Jul 02, 2025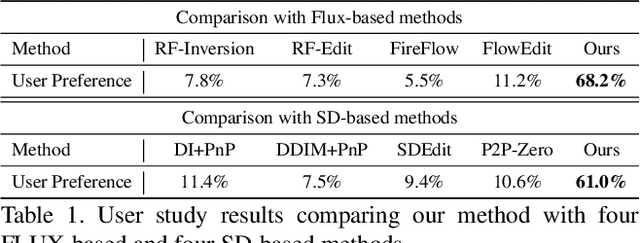
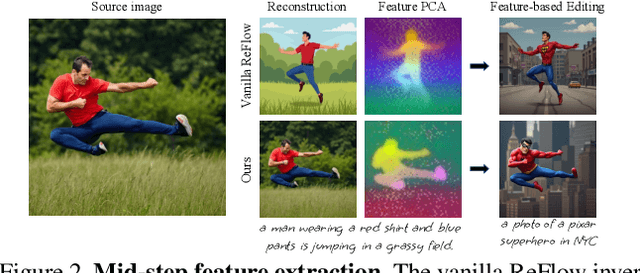
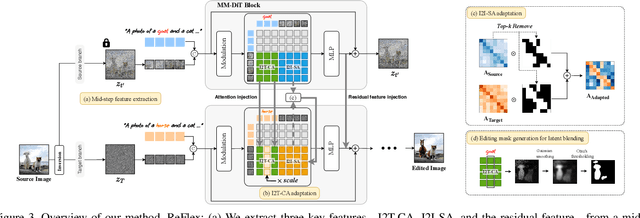
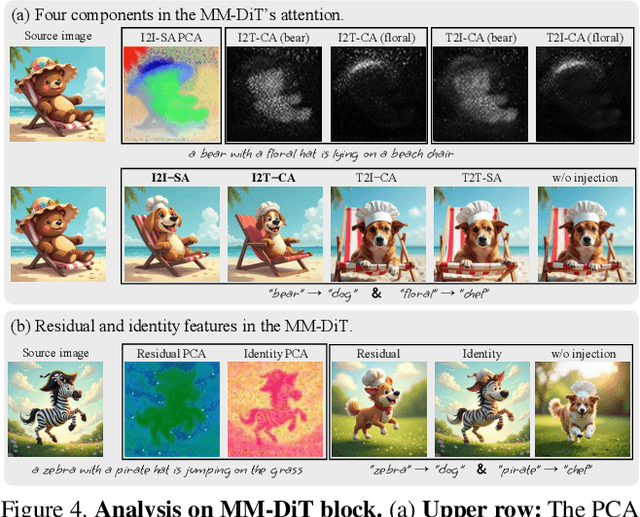
Rectified Flow text-to-image models surpass diffusion models in image quality and text alignment, but adapting ReFlow for real-image editing remains challenging. We propose a new real-image editing method for ReFlow by analyzing the intermediate representations of multimodal transformer blocks and identifying three key features. To extract these features from real images with sufficient structural preservation, we leverage mid-step latent, which is inverted only up to the mid-step. We then adapt attention during injection to improve editability and enhance alignment to the target text. Our method is training-free, requires no user-provided mask, and can be applied even without a source prompt. Extensive experiments on two benchmarks with nine baselines demonstrate its superior performance over prior methods, further validated by human evaluations confirming a strong user preference for our approach.
MC-Swarm: Minimal-Communication Multi-Agent Trajectory Planning and Deadlock Resolution for Quadrotor Swarm
May 13, 2025For effective multi-agent trajectory planning, it is important to consider lightweight communication and its potential asynchrony. This paper presents a distributed trajectory planning algorithm for a quadrotor swarm that operates asynchronously and requires no communication except during the initial planning phase. Moreover, our algorithm guarantees no deadlock under asynchronous updates and absence of communication during flight. To effectively ensure these points, we build two main modules: coordination state updater and trajectory optimizer. The coordination state updater computes waypoints for each agent toward its goal and performs subgoal optimization while considering deadlocks, as well as safety constraints with respect to neighbor agents and obstacles. Then, the trajectory optimizer generates a trajectory that ensures collision avoidance even with the asynchronous planning updates of neighboring agents. We provide a theoretical guarantee of collision avoidance with deadlock resolution and evaluate the effectiveness of our method in complex simulation environments, including random forests and narrow-gap mazes. Additionally, to reduce the total mission time, we design a faster coordination state update using lightweight communication. Lastly, our approach is validated through extensive simulations and real-world experiments with cluttered environment scenarios.
Task-Specific Preconditioner for Cross-Domain Few-Shot Learning
Dec 20, 2024
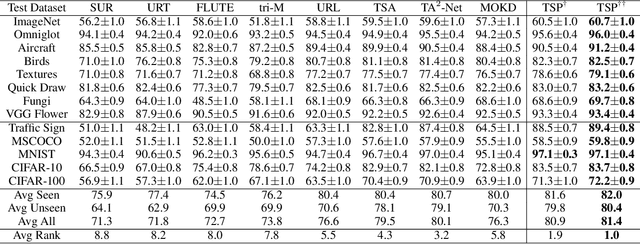
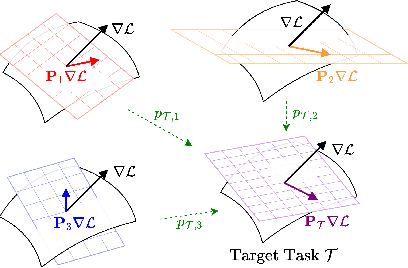
Cross-Domain Few-Shot Learning~(CDFSL) methods typically parameterize models with task-agnostic and task-specific parameters. To adapt task-specific parameters, recent approaches have utilized fixed optimization strategies, despite their potential sub-optimality across varying domains or target tasks. To address this issue, we propose a novel adaptation mechanism called Task-Specific Preconditioned gradient descent~(TSP). Our method first meta-learns Domain-Specific Preconditioners~(DSPs) that capture the characteristics of each meta-training domain, which are then linearly combined using task-coefficients to form the Task-Specific Preconditioner. The preconditioner is applied to gradient descent, making the optimization adaptive to the target task. We constrain our preconditioners to be positive definite, guiding the preconditioned gradient toward the direction of steepest descent. Empirical evaluations on the Meta-Dataset show that TSP achieves state-of-the-art performance across diverse experimental scenarios.
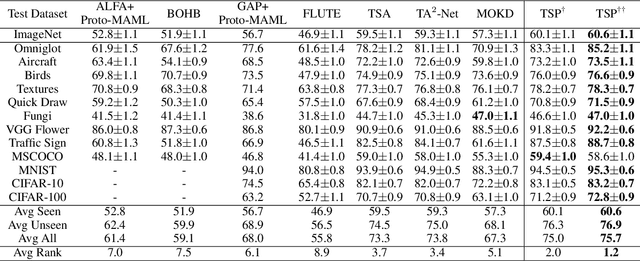
Cross-Attention Head Position Patterns Can Align with Human Visual Concepts in Text-to-Image Generative Models
Dec 03, 2024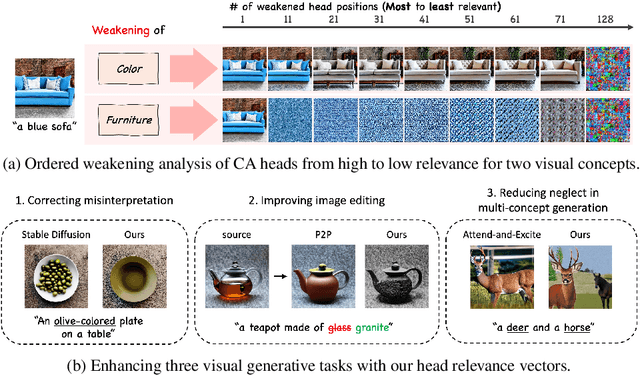
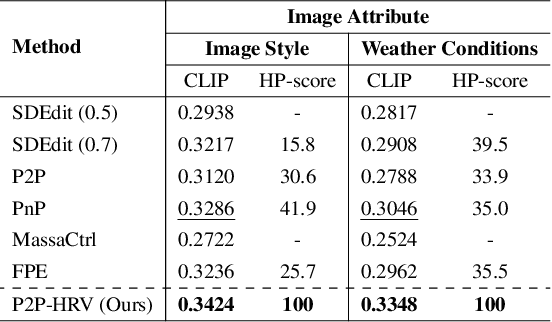
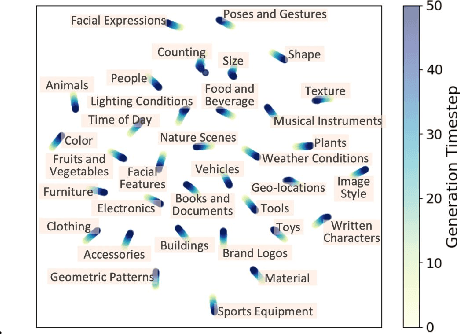

Recent text-to-image diffusion models leverage cross-attention layers, which have been effectively utilized to enhance a range of visual generative tasks. However, our understanding of cross-attention layers remains somewhat limited. In this study, we present a method for constructing Head Relevance Vectors (HRVs) that align with useful visual concepts. An HRV for a given visual concept is a vector with a length equal to the total number of cross-attention heads, where each element represents the importance of the corresponding head for the given visual concept. We develop and employ an ordered weakening analysis to demonstrate the effectiveness of HRVs as interpretable features. To demonstrate the utility of HRVs, we propose concept strengthening and concept adjusting methods and apply them to enhance three visual generative tasks. We show that misinterpretations of polysemous words in image generation can be corrected in most cases, five challenging attributes in image editing can be successfully modified, and catastrophic neglect in multi-concept generation can be mitigated. Overall, our work provides an advancement in understanding cross-attention layers and introduces new approaches for fine-controlling these layers at the head level.
DMVC-Tracker: Distributed Multi-Agent Trajectory Planning for Target Tracking Using Dynamic Buffered Voronoi and Inter-Visibility Cells
Nov 27, 2024



This letter presents a distributed trajectory planning method for multi-agent aerial tracking. The proposed method uses a Dynamic Buffered Voronoi Cell (DBVC) and a Dynamic Inter-Visibility Cell (DIVC) to formulate the distributed trajectory generation. Specifically, the DBVC and the DIVC are time-variant spaces that prevent mutual collisions and occlusions among agents, while enabling them to maintain suitable distances from the moving target. We combine the DBVC and the DIVC with an efficient Bernstein polynomial motion primitive-based tracking generation method, which has been refined into a less conservative approach than in our previous work. The proposed algorithm can compute each agent's trajectory within several milliseconds on an Intel i7 desktop. We validate the tracking performance in challenging scenarios, including environments with dozens of obstacles.
BPMP-Tracker: A Versatile Aerial Target Tracker Using Bernstein Polynomial Motion Primitives
Aug 08, 2024



This letter presents a versatile trajectory planning pipeline for aerial tracking. The proposed tracker is capable of handling various chasing settings such as complex unstructured environments, crowded dynamic obstacles and multiple-target following. Among the entire pipeline, we focus on developing a predictor for future target motion and a chasing trajectory planner. For rapid computation, we employ the sample-check-select strategy: modules sample a set of candidate movements, check multiple constraints, and then select the best trajectory. Also, we leverage the properties of Bernstein polynomials for quick calculations. The prediction module predicts the trajectories of the targets, which do not overlap with static and dynamic obstacles. Then the trajectory planner outputs a trajectory, ensuring various conditions such as occlusion and collision avoidance, the visibility of all targets within a camera image and dynamical limits. We fully test the proposed tracker in simulations and hardware experiments under challenging scenarios, including dual-target following, environments with dozens of dynamic obstacles and complex indoor and outdoor spaces.
Selectively Informative Description can Reduce Undesired Embedding Entanglements in Text-to-Image Personalization
Mar 22, 2024



In text-to-image personalization, a timely and crucial challenge is the tendency of generated images overfitting to the biases present in the reference images. We initiate our study with a comprehensive categorization of the biases into background, nearby-object, tied-object, substance (in style re-contextualization), and pose biases. These biases manifest in the generated images due to their entanglement into the subject embedding. This undesired embedding entanglement not only results in the reflection of biases from the reference images into the generated images but also notably diminishes the alignment of the generated images with the given generation prompt. To address this challenge, we propose SID~(Selectively Informative Description), a text description strategy that deviates from the prevalent approach of only characterizing the subject's class identification. SID is generated utilizing multimodal GPT-4 and can be seamlessly integrated into optimization-based models. We present comprehensive experimental results along with analyses of cross-attention maps, subject-alignment, non-subject-disentanglement, and text-alignment.
QP Chaser: Polynomial Trajectory Generation for Autonomous Aerial Tracking
Feb 28, 2023Maintaining the visibility of the targets is one of the major objectives of aerial tracking applications. This paper proposes QP Chaser, a trajectory planning pipeline that can enhance the visibility of single- and dual-target in both static and dynamic environments. As the name suggests, the proposed planner generates a target-visible trajectory via quadratic programming problems. First, the predictor forecasts the reachable sets of moving objects with a sample-and-check strategy considering obstacles. Subsequently, the trajectory planner reinforces the visibility of targets with consideration of 1) path topology and 2) reachable sets of targets and obstacles. We define a target-visible region (TVR) with topology analysis of not only static obstacles but also dynamic obstacles, and it reflects reachable sets of moving targets and obstacles to maintain the whole body of the target within the camera image robustly and ceaselessly. The online performance of the proposed planner is validated in multiple scenarios, including high-fidelity simulations and real-world experiments.