 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Deadlock-free Trajectory Planning for Quadrotor Swarm in Obstacle-rich Environments -- Extended version
Paper and Code
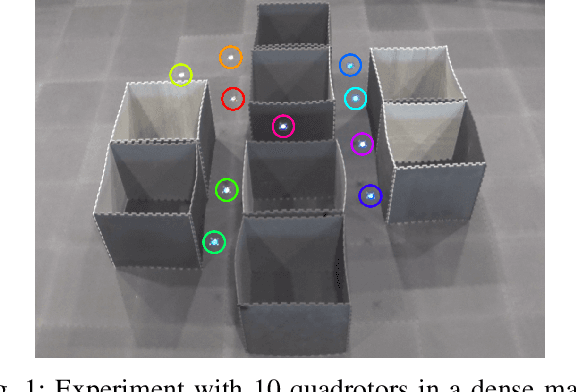
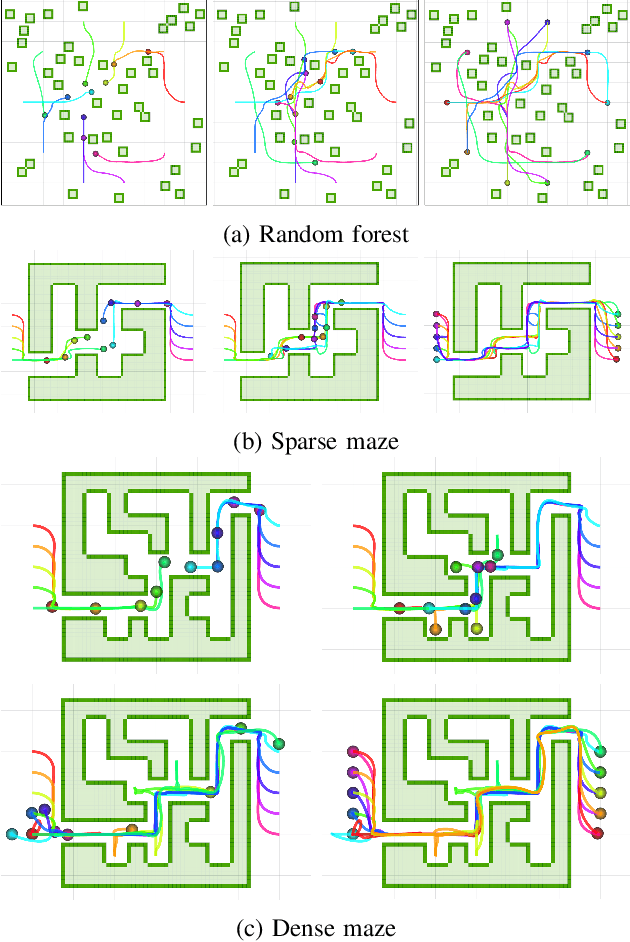
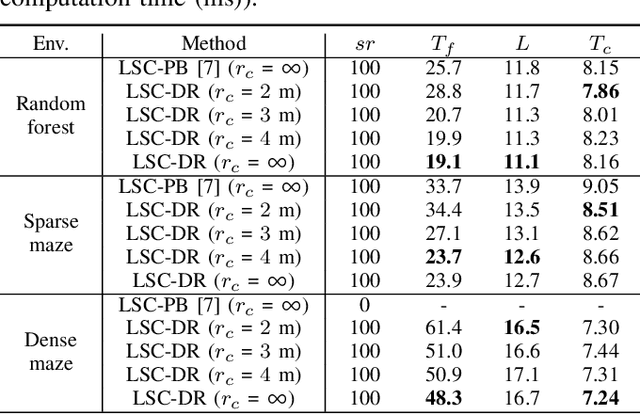
This paper presents a decentralized multi-agent trajectory planning (MATP) algorithm that guarantees to generate a safe, deadlock-free trajectory in an obstacle-rich environment under a limited communication range. The proposed algorithm utilizes a grid-based multi-agent path planning (MAPP) algorithm for deadlock resolution, and we introduce the subgoal optimization method to make the agent converge to the waypoint generated from the MAPP without deadlock. In addition, the proposed algorithm ensures the feasibility of the optimization problem and collision avoidance by adopting a linear safe corridor (LSC). We verify that the proposed algorithm does not cause a deadlock in both random forests and dense mazes regardless of communication range, and it outperforms our previous work in flight time and distance. We validate the proposed algorithm through a hardware demonstration with ten quadrotors.