 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShallow-π: Knowledge Distillation for Flow-based VLAs
Jan 28, 2026The growing demand for real-time robotic deployment necessitates fast and on-device inference for vision-language-action (VLA) models. Within the VLA literature, efficiency has been extensively studied at the token level, such as visual token pruning. In contrast, systematic transformer layer reduction has received limited attention and, to the best of our knowledge, has not been explored for flow-based VLA models under knowledge distillation. In this work, we propose Shallow-pi, a principled knowledge distillation framework that aggressively reduces the transformer depth of both the VLM backbone and the flow-based action head, compressing the model from 18 to 6 layers. Shallow-pi achieves over two times faster inference with less than one percent absolute drop in success rate on standard manipulation benchmarks, establishing state-of-the-art performance among reduced VLA models. Crucially, we validate our approach through industrial-scale real-world experiments on Jetson Orin and Jetson Thor across multiple robot platforms, including humanoid systems, in complex and dynamic manipulation scenarios.
ControlFill: Spatially Adjustable Image Inpainting from Prompt Learning
Mar 06, 2025In this report, I present an inpainting framework named \textit{ControlFill}, which involves training two distinct prompts: one for generating plausible objects within a designated mask (\textit{creation}) and another for filling the region by extending the background (\textit{removal}). During the inference stage, these learned embeddings guide a diffusion network that operates without requiring heavy text encoders. By adjusting the relative significance of the two prompts and employing classifier-free guidance, users can control the intensity of removal or creation. Furthermore, I introduce a method to spatially vary the intensity of guidance by assigning different scales to individual pixels.
SPG: Improving Motion Diffusion by Smooth Perturbation Guidance
Mar 04, 2025This paper presents a test-time guidance method to improve the output quality of the human motion diffusion models without requiring additional training. To have negative guidance, Smooth Perturbation Guidance (SPG) builds a weak model by temporally smoothing the motion in the denoising steps. Compared to model-agnostic methods originating from the image generation field, SPG effectively mitigates out-of-distribution issues when perturbing motion diffusion models. In SPG guidance, the nature of motion structure remains intact. This work conducts a comprehensive analysis across distinct model architectures and tasks. Despite its extremely simple implementation and no need for additional training requirements, SPG consistently enhances motion fidelity. Project page can be found at https://spg-blind.vercel.app/
BPMP-Tracker: A Versatile Aerial Target Tracker Using Bernstein Polynomial Motion Primitives
Aug 08, 2024



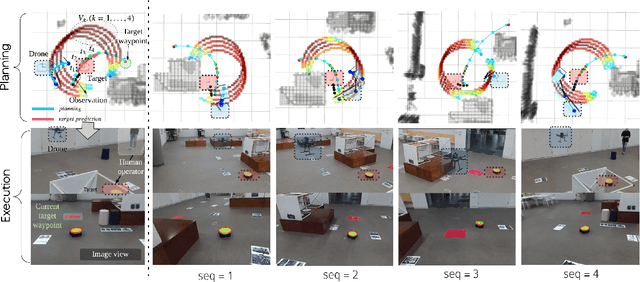
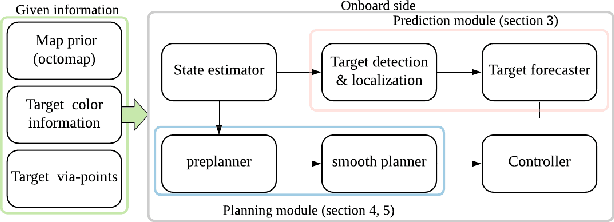
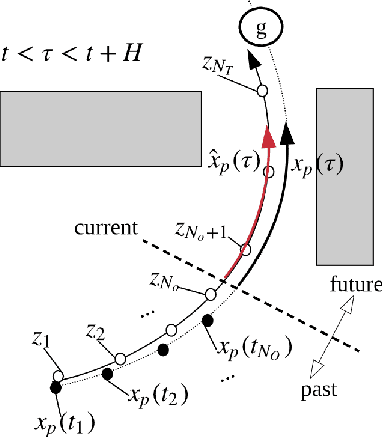
This letter presents a versatile trajectory planning pipeline for aerial tracking. The proposed tracker is capable of handling various chasing settings such as complex unstructured environments, crowded dynamic obstacles and multiple-target following. Among the entire pipeline, we focus on developing a predictor for future target motion and a chasing trajectory planner. For rapid computation, we employ the sample-check-select strategy: modules sample a set of candidate movements, check multiple constraints, and then select the best trajectory. Also, we leverage the properties of Bernstein polynomials for quick calculations. The prediction module predicts the trajectories of the targets, which do not overlap with static and dynamic obstacles. Then the trajectory planner outputs a trajectory, ensuring various conditions such as occlusion and collision avoidance, the visibility of all targets within a camera image and dynamical limits. We fully test the proposed tracker in simulations and hardware experiments under challenging scenarios, including dual-target following, environments with dozens of dynamic obstacles and complex indoor and outdoor spaces.
QP Chaser: Polynomial Trajectory Generation for Autonomous Aerial Tracking
Feb 28, 2023Maintaining the visibility of the targets is one of the major objectives of aerial tracking applications. This paper proposes QP Chaser, a trajectory planning pipeline that can enhance the visibility of single- and dual-target in both static and dynamic environments. As the name suggests, the proposed planner generates a target-visible trajectory via quadratic programming problems. First, the predictor forecasts the reachable sets of moving objects with a sample-and-check strategy considering obstacles. Subsequently, the trajectory planner reinforces the visibility of targets with consideration of 1) path topology and 2) reachable sets of targets and obstacles. We define a target-visible region (TVR) with topology analysis of not only static obstacles but also dynamic obstacles, and it reflects reachable sets of moving targets and obstacles to maintain the whole body of the target within the camera image robustly and ceaselessly. The online performance of the proposed planner is validated in multiple scenarios, including high-fidelity simulations and real-world experiments.
Integrated Motion Planner for Real-time Aerial Videography with a Drone in a Dense Environment
Nov 21, 2019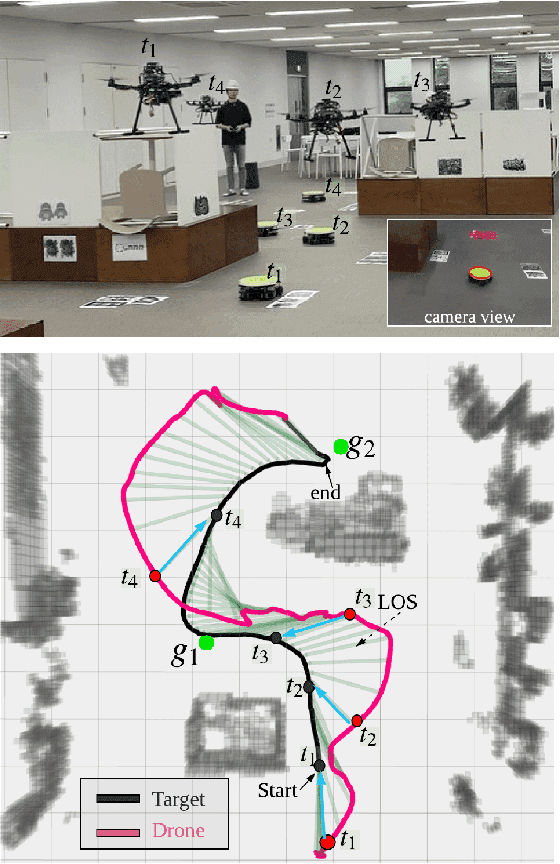
This letter suggests an integrated approach for a drone (or multirotor) to perform an autonomous videography task in a 3-D obstacle environment by following a moving object. The proposed system includes 1) a target motion prediction module which can be applied to dense environments and 2) a hierarchical chasing planner based on a proposed metric for visibility. In the prediction module, we minimize observation error given that the target object itself does not collide with obstacles. The estimated future trajectory of target is obtained by covariant optimization. The other module, chasing planner, is in a bi-level structure composed of preplanner and smooth planner. In the first phase, we leverage a graph-search method to preplan a chasing corridor which incorporates safety and visibility of target during a time window. In the subsequent phase, we generate a smooth and dynamically feasible path within the corridor using quadratic programming (QP). We validate our approach with multiple complex scenarios and actual experiments. The source code can be found in https://github.com/icsl-Jeon/traj_gen_vis