 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Motion Planner for Real-time Aerial Videography with a Drone in a Dense Environment
Paper and Code
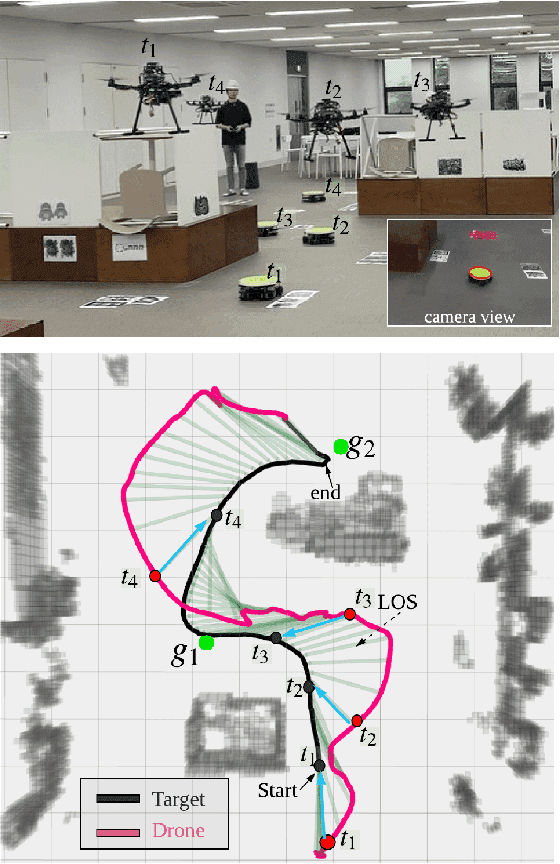
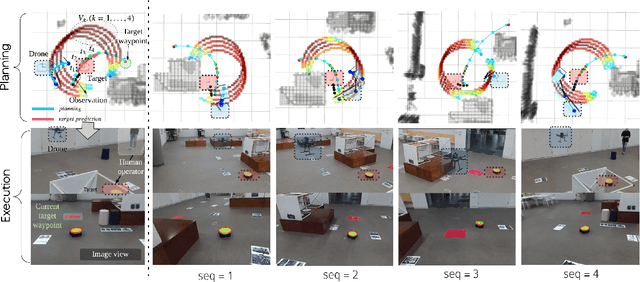
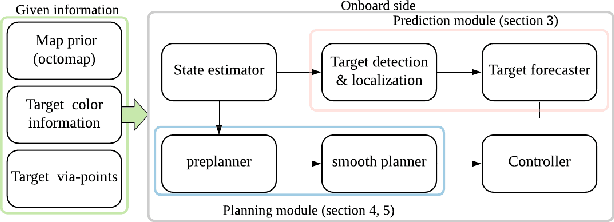
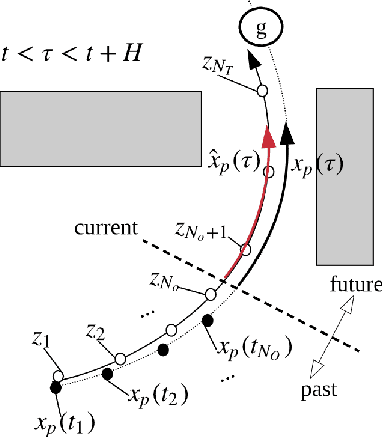
This letter suggests an integrated approach for a drone (or multirotor) to perform an autonomous videography task in a 3-D obstacle environment by following a moving object. The proposed system includes 1) a target motion prediction module which can be applied to dense environments and 2) a hierarchical chasing planner based on a proposed metric for visibility. In the prediction module, we minimize observation error given that the target object itself does not collide with obstacles. The estimated future trajectory of target is obtained by covariant optimization. The other module, chasing planner, is in a bi-level structure composed of preplanner and smooth planner. In the first phase, we leverage a graph-search method to preplan a chasing corridor which incorporates safety and visibility of target during a time window. In the subsequent phase, we generate a smooth and dynamically feasible path within the corridor using quadratic programming (QP). We validate our approach with multiple complex scenarios and actual experiments. The source code can be found in https://github.com/icsl-Jeon/traj_gen_vis