 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature Identification for Hierarchical Contrastive Learning
Oct 01, 2025Hierarchical classification is a crucial task in many applications, where objects are organized into multiple levels of categories. However, conventional classification approaches often neglect inherent inter-class relationships at different hierarchy levels, thus missing important supervisory signals. Thus, we propose two novel hierarchical contrastive learning (HMLC) methods. The first, leverages a Gaussian Mixture Model (G-HMLC) and the second uses an attention mechanism to capture hierarchy-specific features (A-HMLC), imitating human processing. Our approach explicitly models inter-class relationships and imbalanced class distribution at higher hierarchy levels, enabling fine-grained clustering across all hierarchy levels. On the competitive CIFAR100 and ModelNet40 datasets, our method achieves state-of-the-art performance in linear evaluation, outperforming existing hierarchical contrastive learning methods by 2 percentage points in terms of accuracy. The effectiveness of our approach is backed by both quantitative and qualitative results, highlighting its potential for applications in computer vision and beyond.
TRIDE: A Text-assisted Radar-Image weather-aware fusion network for Depth Estimation
Aug 11, 2025Depth estimation, essential for autonomous driving, seeks to interpret the 3D environment surrounding vehicles. The development of radar sensors, known for their cost-efficiency and robustness, has spurred interest in radar-camera fusion-based solutions. However, existing algorithms fuse features from these modalities without accounting for weather conditions, despite radars being known to be more robust than cameras under adverse weather. Additionally, while Vision-Language models have seen rapid advancement, utilizing language descriptions alongside other modalities for depth estimation remains an open challenge. This paper first introduces a text-generation strategy along with feature extraction and fusion techniques that can assist monocular depth estimation pipelines, leading to improved accuracy across different algorithms on the KITTI dataset. Building on this, we propose TRIDE, a radar-camera fusion algorithm that enhances text feature extraction by incorporating radar point information. To address the impact of weather on sensor performance, we introduce a weather-aware fusion block that adaptively adjusts radar weighting based on current weather conditions. Our method, benchmarked on the nuScenes dataset, demonstrates performance gains over the state-of-the-art, achieving a 12.87% improvement in MAE and a 9.08% improvement in RMSE. Code: https://github.com/harborsarah/TRIDE
LiRCDepth: Lightweight Radar-Camera Depth Estimation via Knowledge Distillation and Uncertainty Guidance
Dec 20, 2024Recently, radar-camera fusion algorithms have gained significant attention as radar sensors provide geometric information that complements the limitations of cameras. However, most existing radar-camera depth estimation algorithms focus solely on improving performance, often neglecting computational efficiency. To address this gap, we propose LiRCDepth, a lightweight radar-camera depth estimation model. We incorporate knowledge distillation to enhance the training process, transferring critical information from a complex teacher model to our lightweight student model in three key domains. Firstly, low-level and high-level features are transferred by incorporating pixel-wise and pair-wise distillation. Additionally, we introduce an uncertainty-aware inter-depth distillation loss to refine intermediate depth maps during decoding. Leveraging our proposed knowledge distillation scheme, the lightweight model achieves a 6.6% improvement in MAE on the nuScenes dataset compared to the model trained without distillation.
GET-UP: GEomeTric-aware Depth Estimation with Radar Points UPsampling
Sep 02, 2024



Depth estimation plays a pivotal role in autonomous driving, facilitating a comprehensive understanding of the vehicle's 3D surroundings. Radar, with its robustness to adverse weather conditions and capability to measure distances, has drawn significant interest for radar-camera depth estimation. However, existing algorithms process the inherently noisy and sparse radar data by projecting 3D points onto the image plane for pixel-level feature extraction, overlooking the valuable geometric information contained within the radar point cloud. To address this gap, we propose GET-UP, leveraging attention-enhanced Graph Neural Networks (GNN) to exchange and aggregate both 2D and 3D information from radar data. This approach effectively enriches the feature representation by incorporating spatial relationships compared to traditional methods that rely only on 2D feature extraction. Furthermore, we incorporate a point cloud upsampling task to densify the radar point cloud, rectify point positions, and derive additional 3D features under the guidance of lidar data. Finally, we fuse radar and camera features during the decoding phase for depth estimation. We benchmark our proposed GET-UP on the nuScenes dataset, achieving state-of-the-art performance with a 15.3% and 14.7% improvement in MAE and RMSE over the previously best-performing model.
CaFNet: A Confidence-Driven Framework for Radar Camera Depth Estimation
Jun 30, 2024Depth estimation is critical in autonomous driving for interpreting 3D scenes accurately. Recently, radar-camera depth estimation has become of sufficient interest due to the robustness and low-cost properties of radar. Thus, this paper introduces a two-stage, end-to-end trainable Confidence-aware Fusion Net (CaFNet) for dense depth estimation, combining RGB imagery with sparse and noisy radar point cloud data. The first stage addresses radar-specific challenges, such as ambiguous elevation and noisy measurements, by predicting a radar confidence map and a preliminary coarse depth map. A novel approach is presented for generating the ground truth for the confidence map, which involves associating each radar point with its corresponding object to identify potential projection surfaces. These maps, together with the initial radar input, are processed by a second encoder. For the final depth estimation, we innovate a confidence-aware gated fusion mechanism to integrate radar and image features effectively, thereby enhancing the reliability of the depth map by filtering out radar noise. Our methodology, evaluated on the nuScenes dataset, demonstrates superior performance, improving upon the current leading model by 3.2% in Mean Absolute Error (MAE) and 2.7% in Root Mean Square Error (RMSE).
Enhanced Radar Perception via Multi-Task Learning: Towards Refined Data for Sensor Fusion Applications
Apr 09, 2024Radar and camera fusion yields robustness in perception tasks by leveraging the strength of both sensors. The typical extracted radar point cloud is 2D without height information due to insufficient antennas along the elevation axis, which challenges the network performance. This work introduces a learning-based approach to infer the height of radar points associated with 3D objects. A novel robust regression loss is introduced to address the sparse target challenge. In addition, a multi-task training strategy is employed, emphasizing important features. The average radar absolute height error decreases from 1.69 to 0.25 meters compared to the state-of-the-art height extension method. The estimated target height values are used to preprocess and enrich radar data for downstream perception tasks. Integrating this refined radar information further enhances the performance of existing radar camera fusion models for object detection and depth estimation tasks.
Temporal Patience: Efficient Adaptive Deep Learning for Embedded Radar Data Processing
Sep 11, 2023



Radar sensors offer power-efficient solutions for always-on smart devices, but processing the data streams on resource-constrained embedded platforms remains challenging. This paper presents novel techniques that leverage the temporal correlation present in streaming radar data to enhance the efficiency of Early Exit Neural Networks for Deep Learning inference on embedded devices. These networks add additional classifier branches between the architecture's hidden layers that allow for an early termination of the inference if their result is deemed sufficient enough by an at-runtime decision mechanism. Our methods enable more informed decisions on when to terminate the inference, reducing computational costs while maintaining a minimal loss of accuracy. Our results demonstrate that our techniques save up to 26% of operations per inference over a Single Exit Network and 12% over a confidence-based Early Exit version. Our proposed techniques work on commodity hardware and can be combined with traditional optimizations, making them accessible for resource-constrained embedded platforms commonly used in smart devices. Such efficiency gains enable real-time radar data processing on resource-constrained platforms, allowing for new applications in the context of smart homes, Internet-of-Things, and human-computer interaction.
Uncertainty-based Meta-Reinforcement Learning for Robust Radar Tracking
Oct 26, 2022



Nowadays, Deep Learning (DL) methods often overcome the limitations of traditional signal processing approaches. Nevertheless, DL methods are barely applied in real-life applications. This is mainly due to limited robustness and distributional shift between training and test data. To this end, recent work has proposed uncertainty mechanisms to increase their reliability. Besides, meta-learning aims at improving the generalization capability of DL models. By taking advantage of that, this paper proposes an uncertainty-based Meta-Reinforcement Learning (Meta-RL) approach with Out-of-Distribution (OOD) detection. The presented method performs a given task in unseen environments and provides information about its complexity. This is done by determining first and second-order statistics on the estimated reward. Using information about its complexity, the proposed algorithm is able to point out when tracking is reliable. To evaluate the proposed method, we benchmark it on a radar-tracking dataset. There, we show that our method outperforms related Meta-RL approaches on unseen tracking scenarios in peak performance by 16% and the baseline by 35% while detecting OOD data with an F1-Score of 72%. This shows that our method is robust to environmental changes and reliably detects OOD scenarios.
MEET: A Monte Carlo Exploration-Exploitation Trade-off for Buffer Sampling
Oct 24, 2022Data selection is essential for any data-based optimization technique, such as Reinforcement Learning. State-of-the-art sampling strategies for the experience replay buffer improve the performance of the Reinforcement Learning agent. However, they do not incorporate uncertainty in the Q-Value estimation. Consequently, they cannot adapt the sampling strategies, including exploration and exploitation of transitions, to the complexity of the task. To address this, this paper proposes a new sampling strategy that leverages the exploration-exploitation trade-off. This is enabled by the uncertainty estimation of the Q-Value function, which guides the sampling to explore more significant transitions and, thus, learn a more efficient policy. Experiments on classical control environments demonstrate stable results across various environments. They show that the proposed method outperforms state-of-the-art sampling strategies for dense rewards w.r.t. convergence and peak performance by 26% on average.
Label-Aware Ranked Loss for robust People Counting using Automotive in-cabin Radar
Oct 12, 2021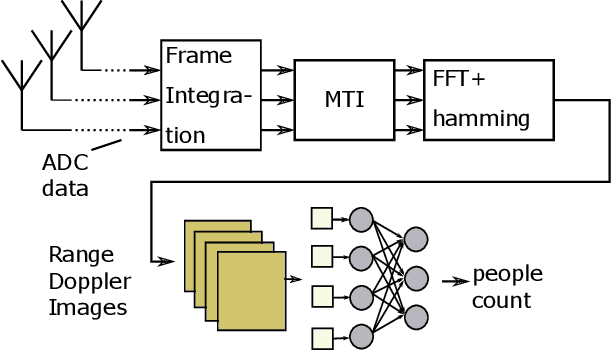
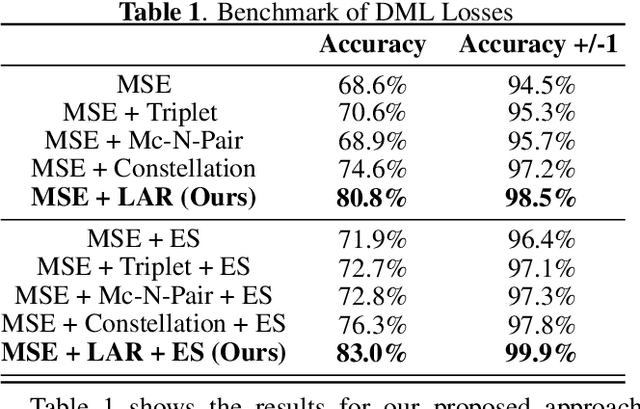
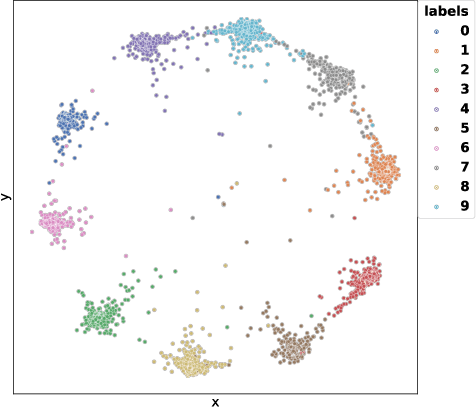
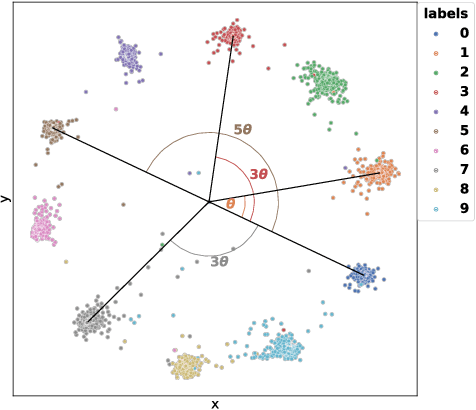
In this paper, we introduce the Label-Aware Ranked loss, a novel metric loss function. Compared to the state-of-the-art Deep Metric Learning losses, this function takes advantage of the ranked ordering of the labels in regression problems. To this end, we first show that the loss minimises when datapoints of different labels are ranked and laid at uniform angles between each other in the embedding space. Then, to measure its performance, we apply the proposed loss on a regression task of people counting with a short-range radar in a challenging scenario, namely a vehicle cabin. The introduced approach improves the accuracy as well as the neighboring labels accuracy up to 83.0% and 99.9%: An increase of 6.7%and 2.1% on state-of-the-art methods, respectively.