 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAppraisal of data-driven and mechanistic emulators of nonlinear hydrodynamic urban drainage simulators
Feb 03, 2017
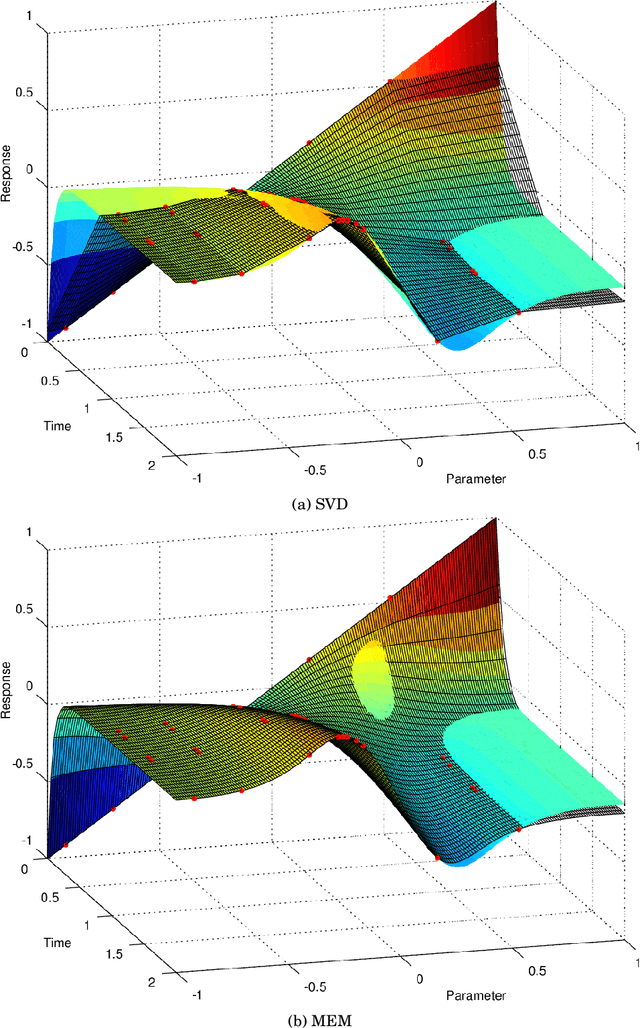
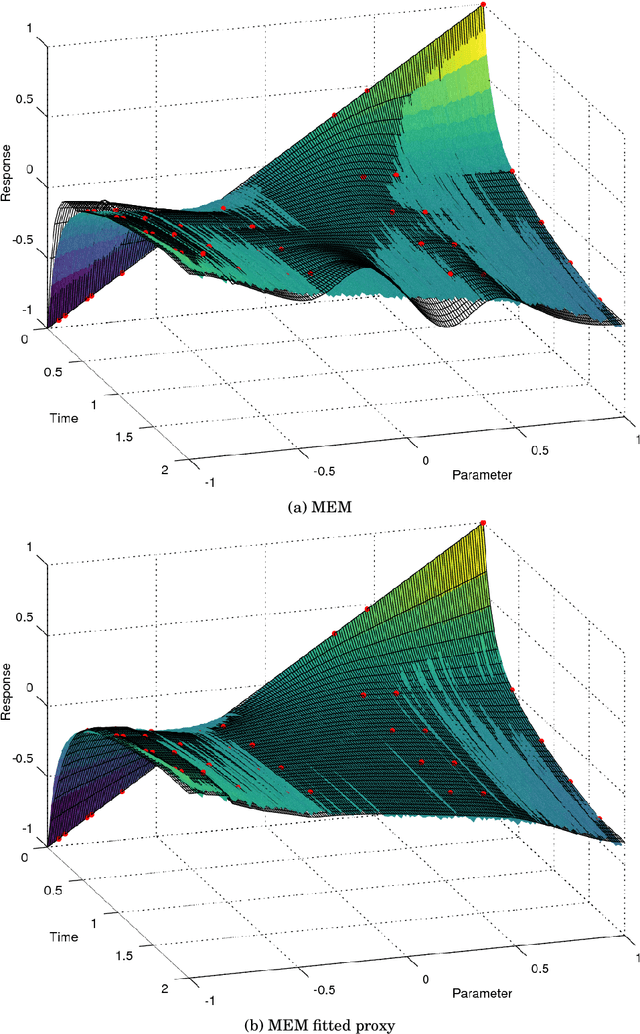
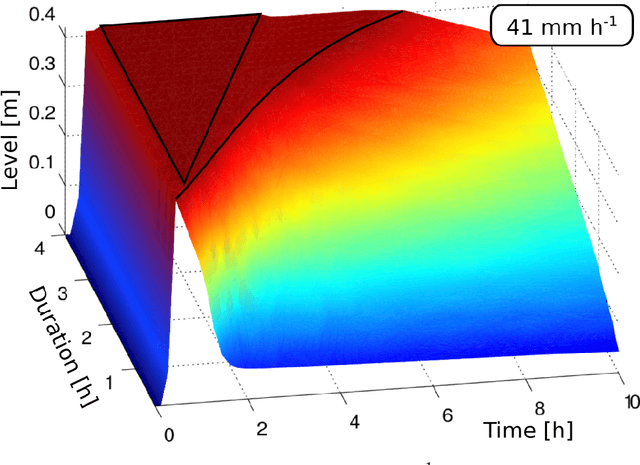
Many model based scientific and engineering methodologies, such as system identification, sensitivity analysis, optimization and control, require a large number of model evaluations. In particular, model based real-time control of urban water infrastructures and online flood alarm systems require fast prediction of the network response at different actuation and/or parameter values. General purpose urban drainage simulators are too slow for this application. Fast surrogate models, so-called emulators, provide a solution to this efficiency demand. Emulators are attractive, because they sacrifice unneeded accuracy in favor of speed. However, they have to be fine-tuned to predict the system behavior satisfactorily. Also, some emulators fail to extrapolate the system behavior beyond the training set. Although, there are many strategies for developing emulators, up until now the selection of the emulation strategy remains subjective. In this paper, we therefore compare the performance of two families of emulators for open channel flows in the context of urban drainage simulators. We compare emulators that explicitly use knowledge of the simulator's equations, i.e. mechanistic emulators based on Gaussian Processes, with purely data-driven emulators using matrix factorization. Our results suggest that in many urban applications, naive data-driven emulation outperforms mechanistic emulation. Nevertheless, we discuss scenarios in which we think that mechanistic emulation might be favorable for i) extrapolation in time and ii) dealing with sparse and unevenly sampled data. We also provide many references to advances in the field of Machine Learning that have not yet permeated into the Bayesian environmental science community.
Building ArtBots to Attract Students into STEM Learning
Aug 11, 2016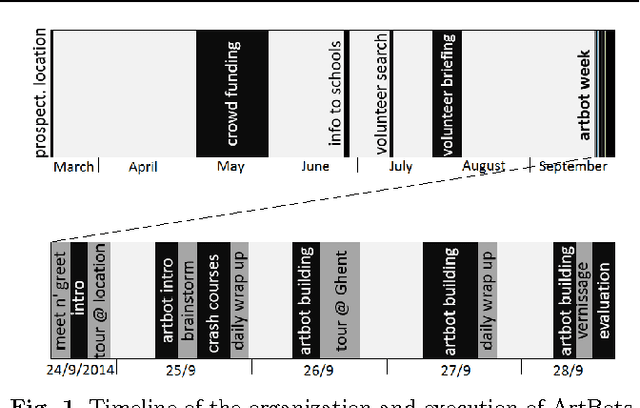
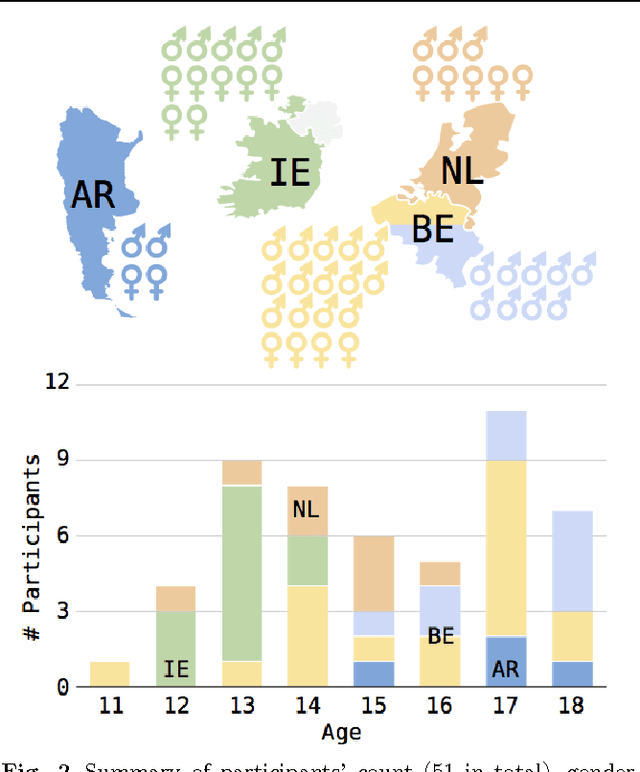
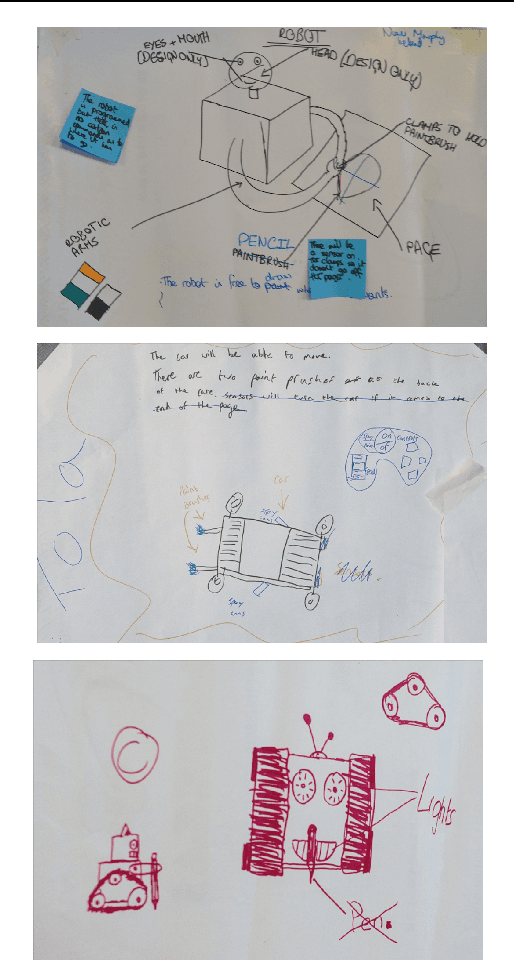
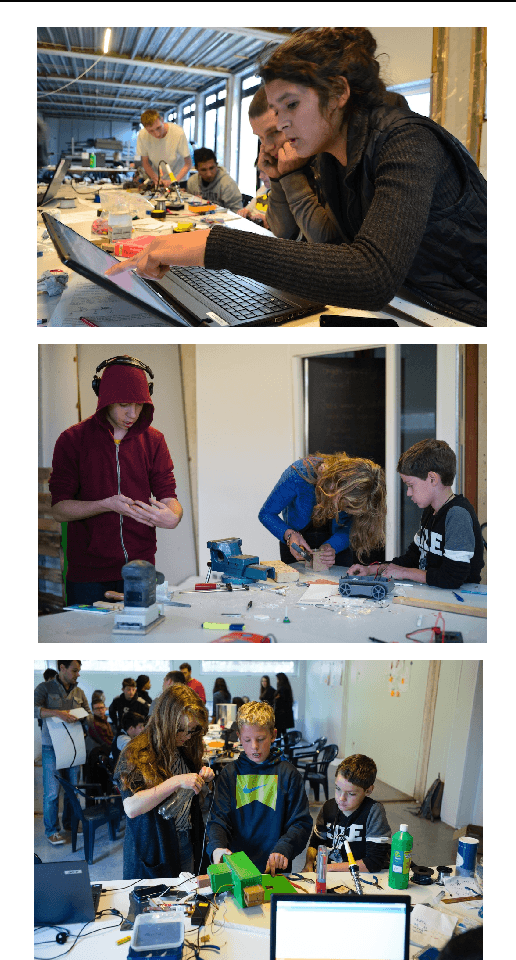
There is an increasing worldwide demand for people educated into science and technology. Unfortunately, girls and underprivileged students are often underrepresented in Science, Technology, Engineering and Mathematics (STEM) education programs. We believe that by inclusion of art in these programs, educational activities might become more attractive to a broader audience. In this work we present an example of such an educational activity: an international robotics and art week for secondary school students. This educational activity builds up on the project-based and inquiry learning framework. This article is intended as a brief manual to help others organise such an activity. It also gives insights in how we led a highly heterogeneous group of students into learning STEM and becoming science and technology ambassadors for their peers.
Memristor models for machine learning
Jul 14, 2014In the quest for alternatives to traditional CMOS, it is being suggested that digital computing efficiency and power can be improved by matching the precision to the application. Many applications do not need the high precision that is being used today. In particular, large gains in area- and power efficiency could be achieved by dedicated analog realizations of approximate computing engines. In this work, we explore the use of memristor networks for analog approximate computation, based on a machine learning framework called reservoir computing. Most experimental investigations on the dynamics of memristors focus on their nonvolatile behavior. Hence, the volatility that is present in the developed technologies is usually unwanted and it is not included in simulation models. In contrast, in reservoir computing, volatility is not only desirable but necessary. Therefore, in this work, we propose two different ways to incorporate it into memristor simulation models. The first is an extension of Strukov's model and the second is an equivalent Wiener model approximation. We analyze and compare the dynamical properties of these models and discuss their implications for the memory and the nonlinear processing capacity of memristor networks. Our results indicate that device variability, increasingly causing problems in traditional computer design, is an asset in the context of reservoir computing. We conclude that, although both models could lead to useful memristor based reservoir computing systems, their computational performance will differ. Therefore, experimental modeling research is required for the development of accurate volatile memristor models.
Robustness: a new SLIP model based criterion for gait transitions in bipedal locomotion
Mar 04, 2014
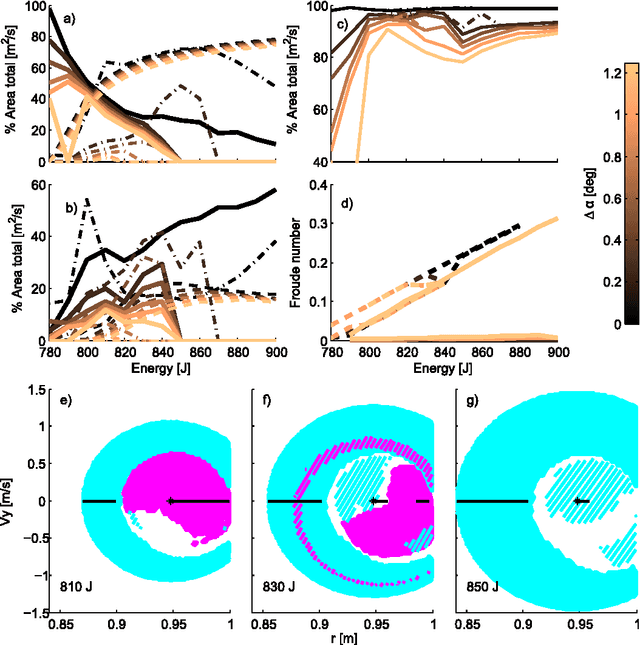
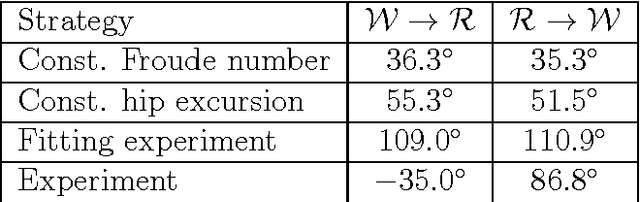
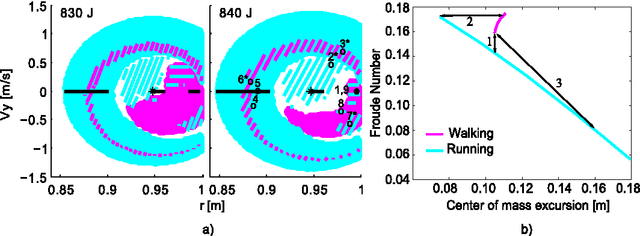
Bipedal locomotion is a phenomenon that still eludes a fundamental and concise mathematical understanding. Conceptual models that capture some relevant aspects of the process exist but their full explanatory power is not yet exhausted. In the current study, we introduce the robustness criterion which defines the conditions for stable locomotion when steps are taken with imprecise angle of attack. Intuitively, the necessity of a higher precision indicates the difficulty to continue moving with a given gait. We show that the spring-loaded inverted pendulum model, under the robustness criterion, is consistent with previously reported findings on attentional demand during human locomotion. This criterion allows transitions between running and walking, many of which conserve forward speed. Simulations of transitions predict Froude numbers below the ones observed in humans, nevertheless the model satisfactorily reproduces several biomechanical indicators such as hip excursion, gait duty factor and vertical ground reaction force profiles. Furthermore, we identify reversible robust walk-run transitions, which allow the system to execute a robust version of the hopping gait. These findings foster the spring-loaded inverted pendulum model as the unifying framework for the understanding of bipedal locomotion.
Bio-inspired friction switches: adaptive pulley systems
Jan 21, 2014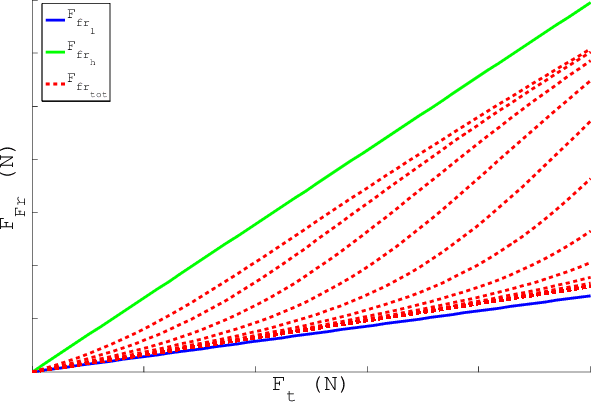
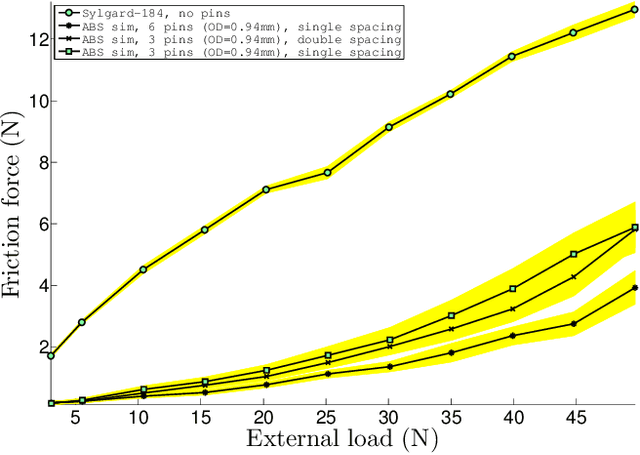
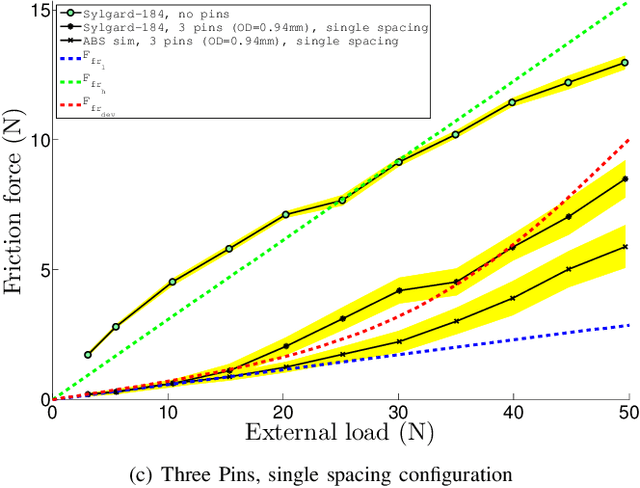
Frictional influences in tendon-driven robotic systems are generally unwanted, with efforts towards minimizing them where possible. In the human hand however, the tendon-pulley system is found to be frictional with a difference between high-loaded static post-eccentric and post-concentric force production of 9-12% of the total output force. This difference can be directly attributed to tendon-pulley friction. Exploiting this phenomenon for robotic and prosthetic applications we can achieve a reduction of actuator size, weight and consequently energy consumption. In this study, we present the design of a bio-inspired friction switch. The adaptive pulley is designed to minimize the influence of frictional forces under low and medium-loading conditions and maximize it under high-loading conditions. This is achieved with a dual-material system that consists of a high-friction silicone substrate and low-friction polished steel pins. The system, designed to switch its frictional properties between the low-loaded and high-loaded conditions, is described and its behavior experimentally validated with respect to the number and spacing of pins. The results validate its intended behavior, making it a viable choice for robotic tendon-driven systems.
* Conference. First submission, before reviews
Synthesis and Adaptation of Effective Motor Synergies for the Solution of Reaching Tasks
May 16, 2012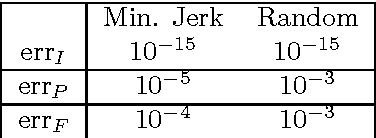
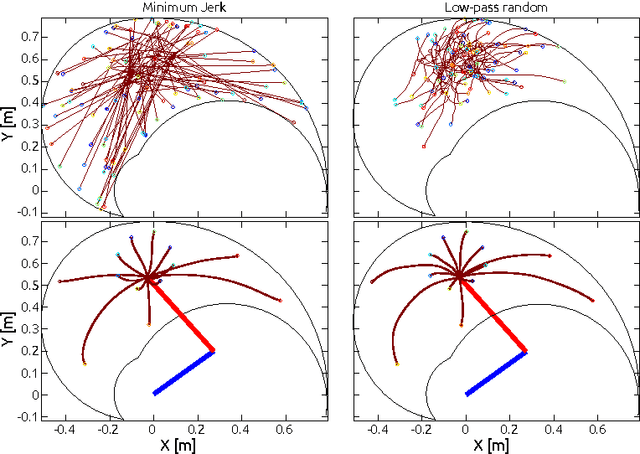
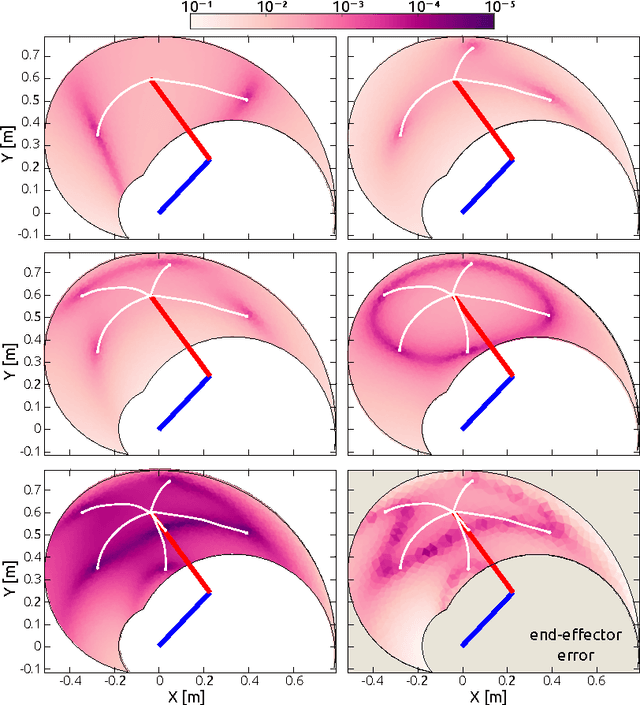
Taking inspiration from the hypothesis of muscle synergies, we propose a method to generate open loop controllers for an agent solving point-to-point reaching tasks. The controller output is defined as a linear combination of a small set of predefined actuations, termed synergies. The method can be interpreted from a developmental perspective, since it allows the agent to autonomously synthesize and adapt an effective set of synergies to new behavioral needs. This scheme greatly reduces the dimensionality of the control problem, while keeping a good performance level. The framework is evaluated in a planar kinematic chain, and the quality of the solutions is quantified in several scenarios.
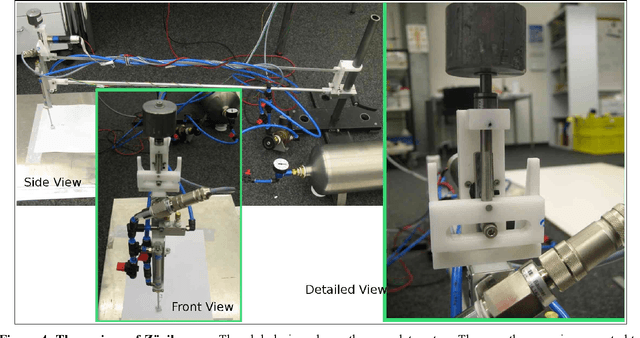
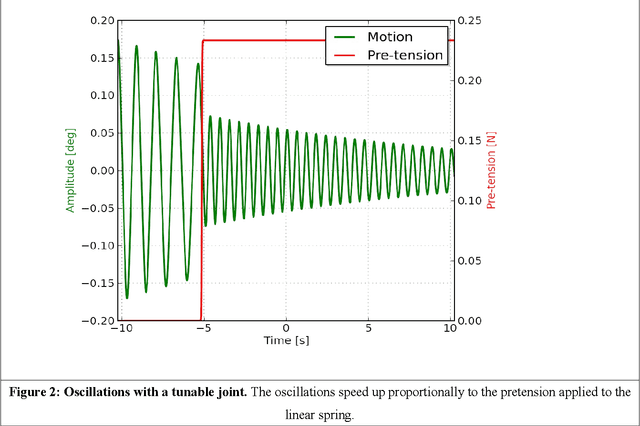
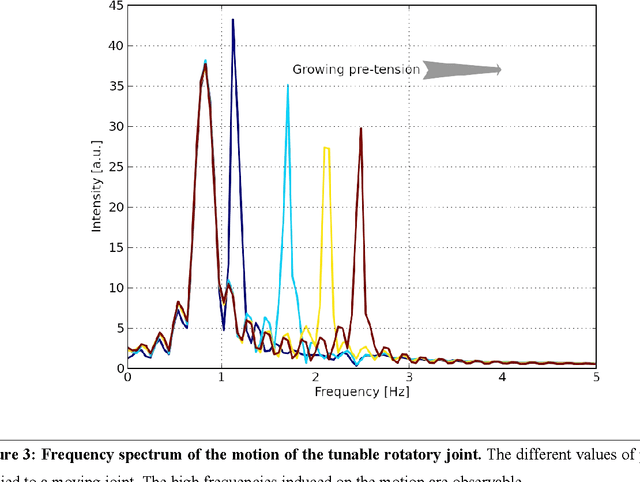
Modeling and frequency domain analysis of nonlinear compliant joints for a passive dynamic swimmer
Dec 22, 2011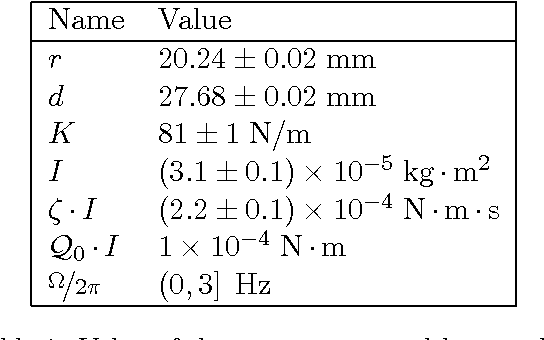
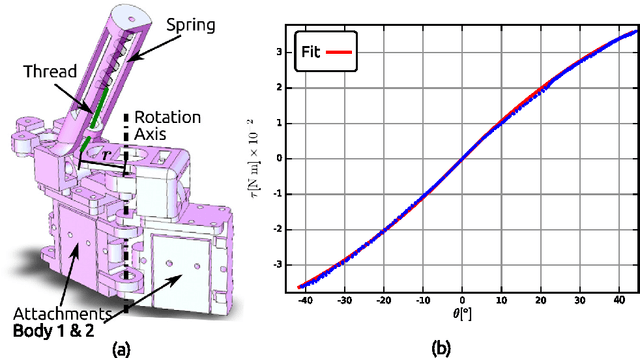
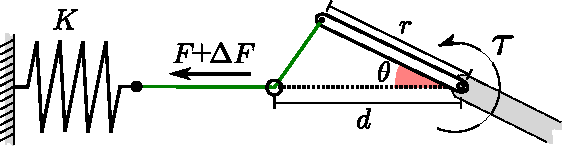
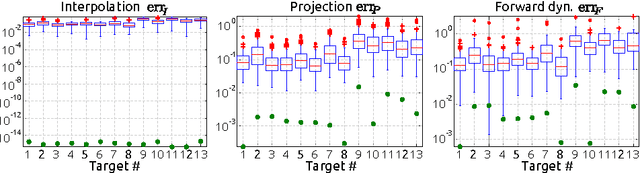
In this paper we present the study of the mathematical model of a real life joint used in an underwater robotic fish. Fluid-structure interaction is utterly simplified and the motion of the joint is approximated by D\"uffing's equation. We compare the quality of analytical harmonic solutions previously reported, with the input-output relation obtained via truncated Volterra series expansion. Comparisons show a trade-off between accuracy and flexibility of the methods. The methods are discussed in detail in order to facilitate reproduction of our results. The approach presented herein can be used to verify results in nonlinear resonance applications and in the design of bio-inspired compliant robots that exploit passive properties of their dynamics. We focus on the potential use of this type of joint for energy extraction from environmental sources, in this case a K\'arm\'an vortex street shed by an obstacle in a flow. Open challenges and questions are mentioned throughout the document.
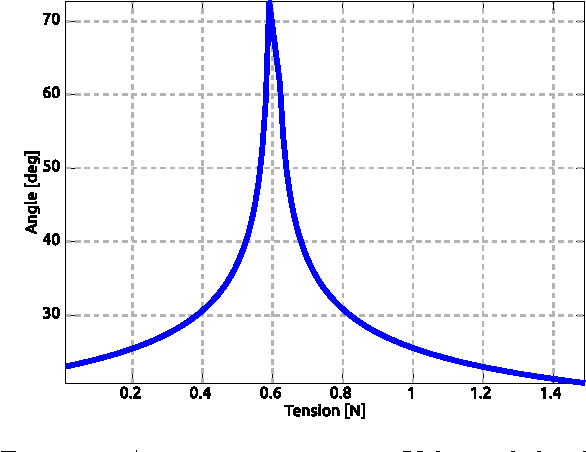
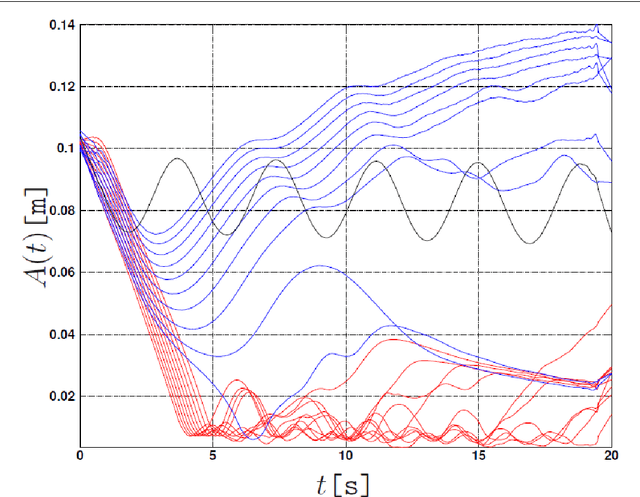
Magneto-mechanical actuation model for fin-based locomotion
Aug 22, 2011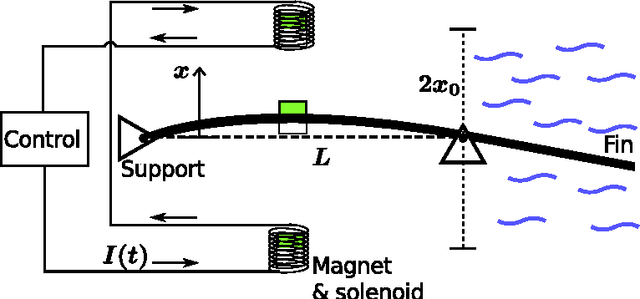
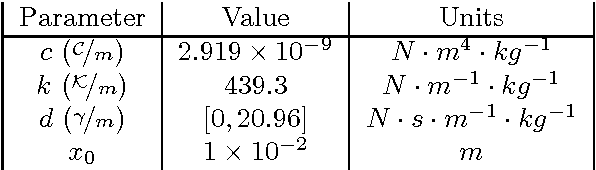
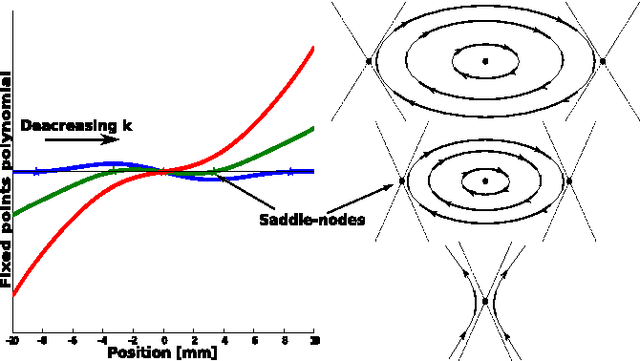
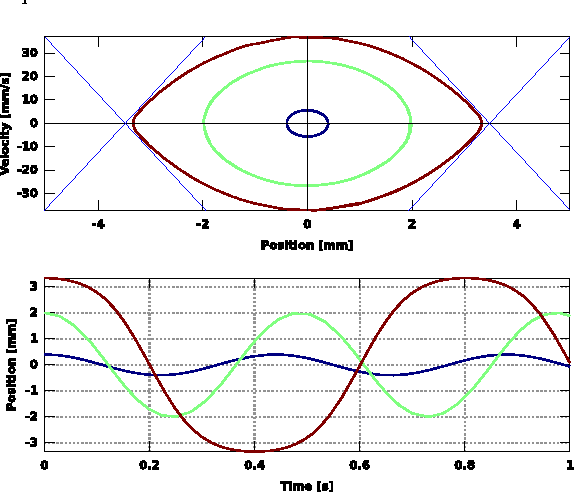
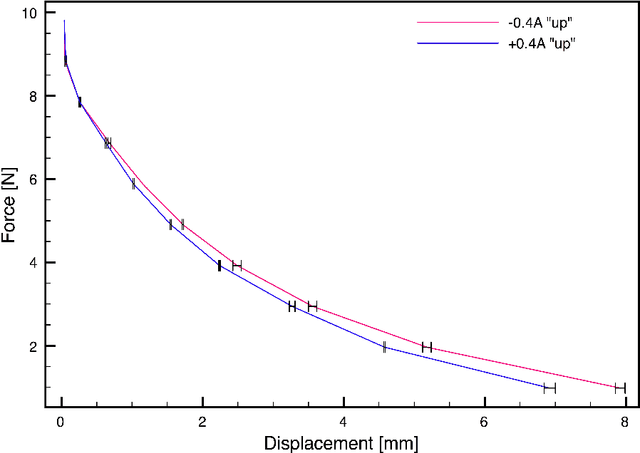
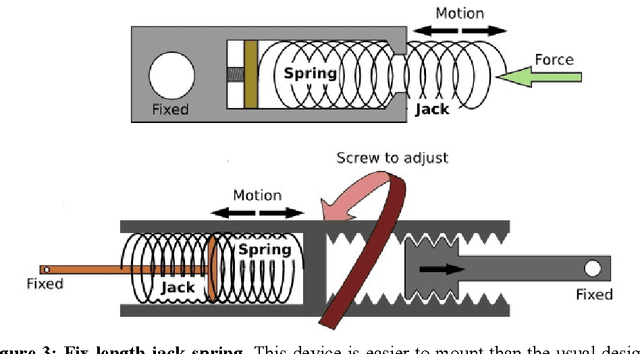
In this paper, we report the results from the analysis of a numerical model used for the design of a magnetic linear actuator with applications to fin-based locomotion. Most of the current robotic fish generate bending motion using rotary motors which implies at least one mechanical conversion of the motion. We seek a solution that directly bends the fin and, at the same time, is able to exploit the magneto-mechanical properties of the fin material. This strong fin-actuator coupling blends the actuator and the body of the robot, allowing cross optimization of the system's elements. We study a simplified model of an elastic element, a spring-mass system representing a flexible fin, subjected to nonlinear forcing, emulating magnetic interaction. The dynamics of the system is studied under unforced and periodic forcing conditions. The analysis is focused on the limit cycles present in the system, which allows the periodic bending of the fin and the generation of thrust. The frequency, maximum amplitude and center of the periodic orbits (offset of the bending) depend directly on the stiffness of the fin and the intensity of the forcing; we use this dependency to sketch a simple parameter controller. Although the model is strongly simplified, it provides means to estimate first values of the parameters for this kind of actuator and it is useful to evaluate the feasibility of minimal actuation control of such systems.
* Conference paper, 2010
SNF Project Locomotion: Progress report 2008-2009
Aug 22, 2011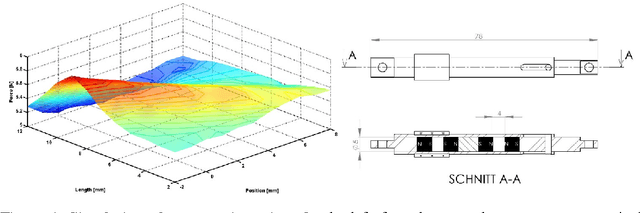
Summary of results (project period 1. 10. 2008 - 30. 9. 2009) of SNFS Project "From locomotion to cognition" The research that we have been involved in, and will continue to do, starts from the insight that in order to understand and design intelligent behavior, we must adopt an embodied perspective, i.e. we must take the entire agent, including its shape or morphology, the materials out of which it is built, and its interaction with the environment into account, in addition to the neural control. A lot of our research in the past has been on relatively low-level sensory-motor tasks such as locomotion (e.g. walking, running, jumping), navigation, and grasping. While this research is of interest in itself, in the context of artificial intelligence and cognitive science, this leads to the question of what these kinds of tasks have to do with higher levels of cognition, or to put it more provocatively, "What does walking have to do with thinking?" This question is of course reminiscent of the notorious "symbol grounding problem". In contrast to most of the research on symbol grounding, we propose to exploit the dynamic interaction between the embodied agent and the environment as the basis for grounding. We use the term "morphological computation" to designate the fact that some of the control or computation can be taken over by the dynamic interaction derived from morphological properties (e.g. the passive forward swing of the leg in walking, the spring-like properties of the muscles, and the weight distribution). By taking morphological computation into account, an agent will be able to achieve not only faster, more robust, and more energy-efficient behavior, but also more situated exploration by the agent for the comprehensive understanding of the environment.
SNF Project Locomotion: Final report 2009-2010
Aug 22, 2011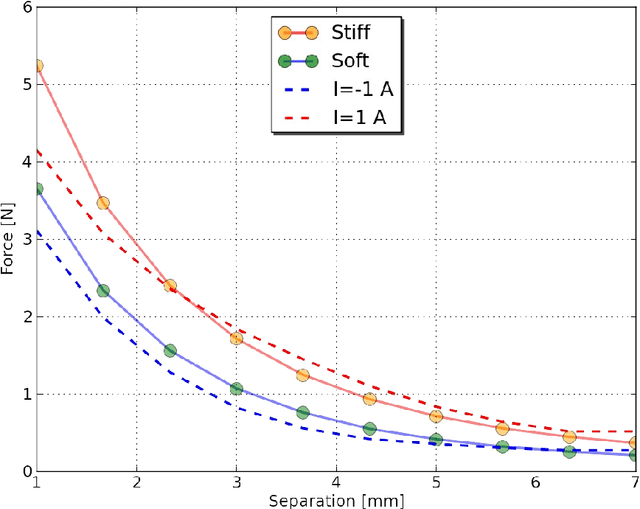
Summary of results in last project period (1. 10. 2009 - 30. 9. 2010) of SNFS Project "From locomotion to cognition" The research that we have been involved in, and will continue to do, starts from the insight that in order to understand and design intelligent behavior, we must adopt an embodied perspective, i.e. we must take the entire agent, including its shape or morphology, the materials out of which it is built, and its interaction with the environment into account, in addition to the neural control. A lot of our research in the past has been on relatively low-level sensory-motor tasks such as locomotion (e.g. walking, running, jumping), navigation, and grasping. While this research is of interest in itself, in the context of artificial intelligence and cognitive science, this leads to the question of what these kinds of tasks have to do with higher levels of cognition, or to put it more provocatively, "What does walking have to do with thinking?" This question is of course reminiscent of the notorious "symbol grounding problem". In contrast to most of the research on symbol grounding, we propose to exploit the dynamic interaction between the embodied agent and the environment as the basis for grounding. We use the term "morphological computation" to designate the fact that some of the control or computation can be taken over by the dynamic interaction derived from morphological properties (e.g. the passive forward swing of the leg in walking, the spring-like properties of the muscles, and the weight distribution). By taking morphological computation into account, an agent will be able to achieve not only faster, more robust, and more energy-efficient behavior, but also more situated exploration by the agent for the comprehensive understanding of the environment.