 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonSysId: A nonlinear system identification package with improved model term selection for NARMAX models
Nov 25, 2024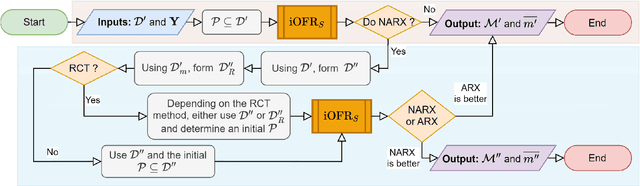
System identification involves constructing mathematical models of dynamic systems using input-output data, enabling analysis and prediction of system behaviour in both time and frequency domains. This approach can model the entire system or capture specific dynamics within it. For meaningful analysis, it is essential for the model to accurately reflect the underlying system's behaviour. This paper introduces NonSysId, an open-sourced MATLAB software package designed for nonlinear system identification, specifically focusing on NARMAX models. The software incorporates an advanced term selection methodology that prioritises on simulation (free-run) accuracy while preserving model parsimony. A key feature is the integration of iterative Orthogonal Forward Regression (iOFR) with Predicted Residual Sum of Squares (PRESS) statistic-based term selection, facilitating robust model generalisation without the need for a separate validation dataset. Furthermore, techniques for reducing computational overheads are implemented. These features make NonSysId particularly suitable for real-time applications such as structural health monitoring, fault diagnosis, and biomedical signal processing, where it is a challenge to capture the signals under consistent conditions, resulting in limited or no validation data.
Orthogonal Least Squares Based Fast Feature Selection for Linear Classification
Jan 21, 2021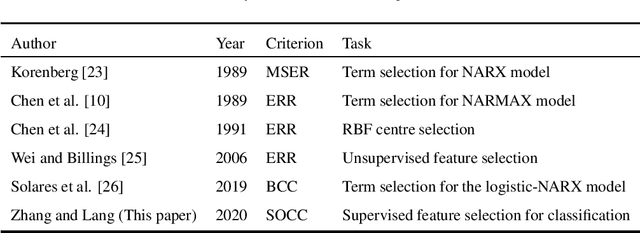
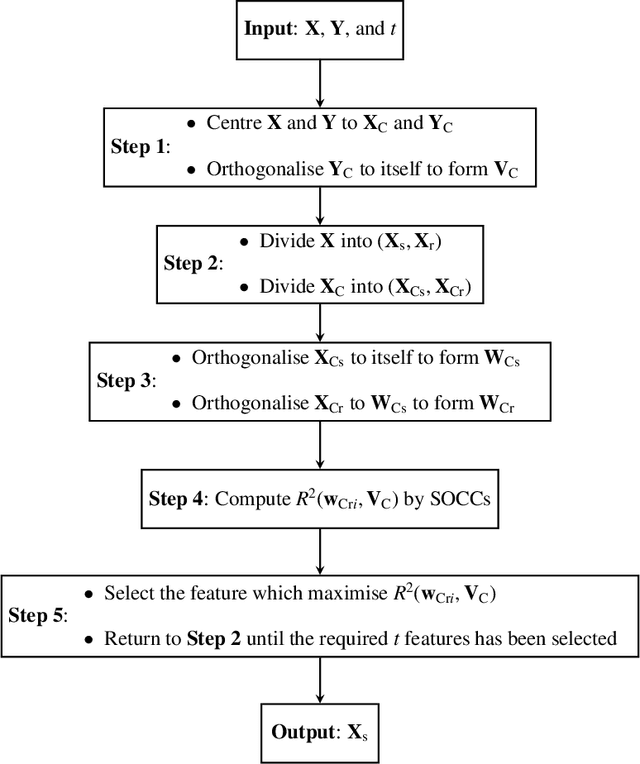
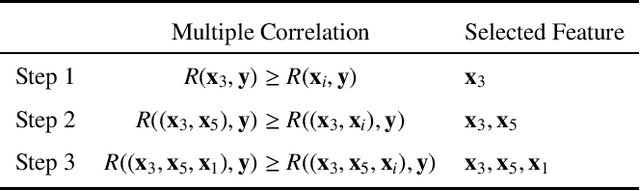
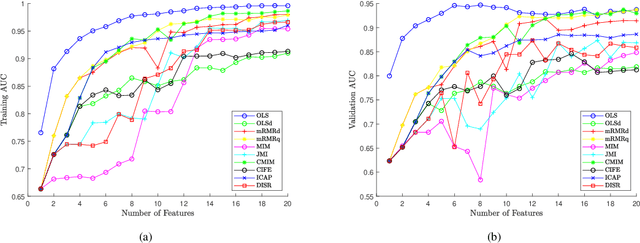
An Orthogonal Least Squares (OLS) based feature selection method is proposed for both binomial and multinomial classification. The novel Squared Orthogonal Correlation Coefficient (SOCC) is defined based on Error Reduction Ratio (ERR) in OLS and used as the feature ranking criterion. The equivalence between the canonical correlation coefficient, Fisher's criterion, and the sum of the SOCCs is revealed, which unveils the statistical implication of ERR in OLS for the first time. It is also shown that the OLS based feature selection method has speed advantages when applied for greedy search. The proposed method is comprehensively compared with the mutual information based feature selection methods in 2 synthetic and 7 real world datasets. The results show that the proposed method is always in the top 5 among the 10 candidate methods. Besides, the proposed method can be directly applied to continuous features without discretisation, which is another significant advantage over mutual information based methods.
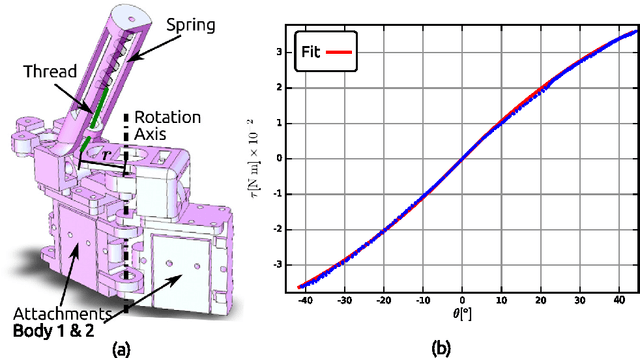
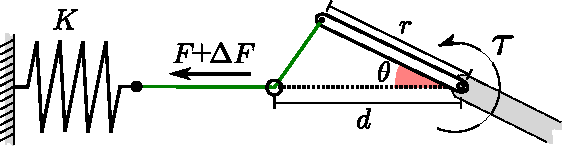
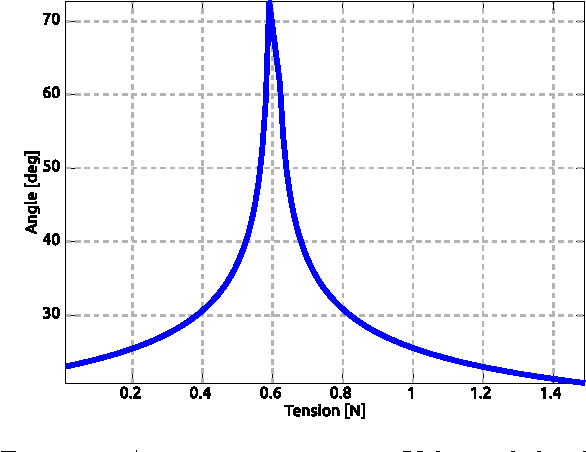
Modeling and frequency domain analysis of nonlinear compliant joints for a passive dynamic swimmer
Dec 22, 2011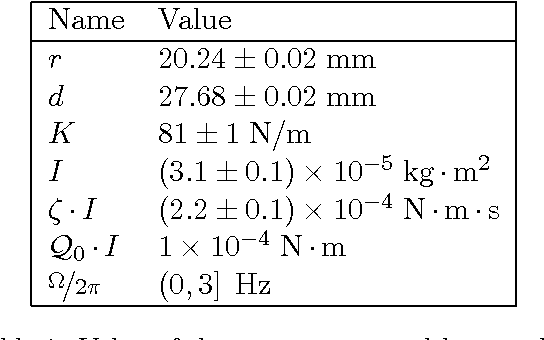
In this paper we present the study of the mathematical model of a real life joint used in an underwater robotic fish. Fluid-structure interaction is utterly simplified and the motion of the joint is approximated by D\"uffing's equation. We compare the quality of analytical harmonic solutions previously reported, with the input-output relation obtained via truncated Volterra series expansion. Comparisons show a trade-off between accuracy and flexibility of the methods. The methods are discussed in detail in order to facilitate reproduction of our results. The approach presented herein can be used to verify results in nonlinear resonance applications and in the design of bio-inspired compliant robots that exploit passive properties of their dynamics. We focus on the potential use of this type of joint for energy extraction from environmental sources, in this case a K\'arm\'an vortex street shed by an obstacle in a flow. Open challenges and questions are mentioned throughout the document.