 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and frequency domain analysis of nonlinear compliant joints for a passive dynamic swimmer
Dec 22, 2011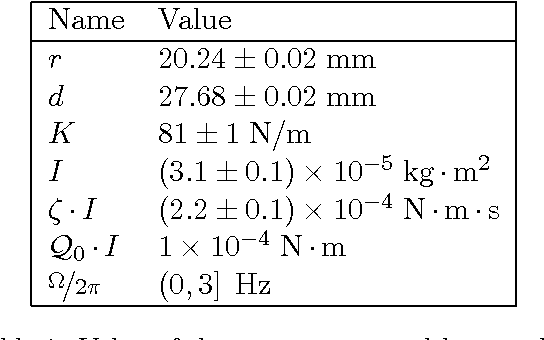
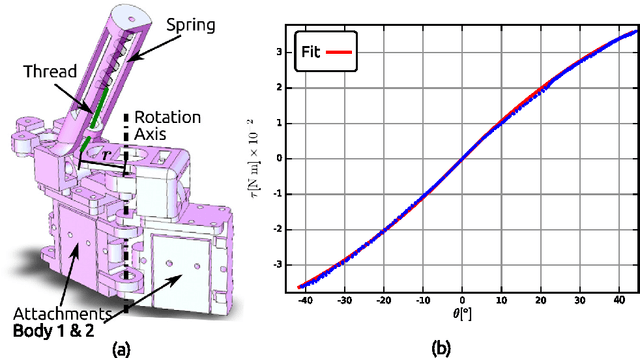
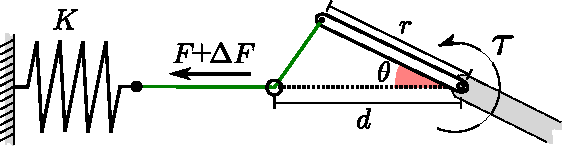
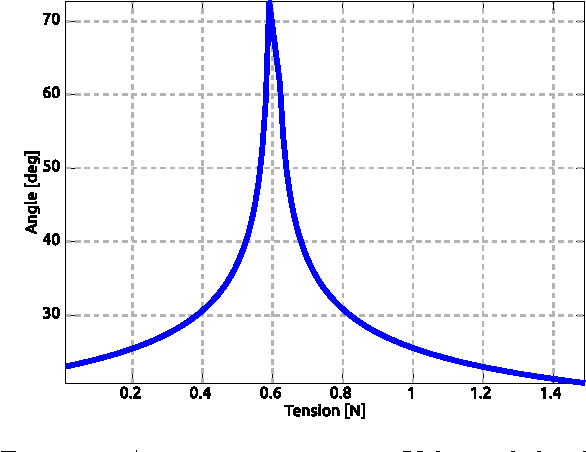
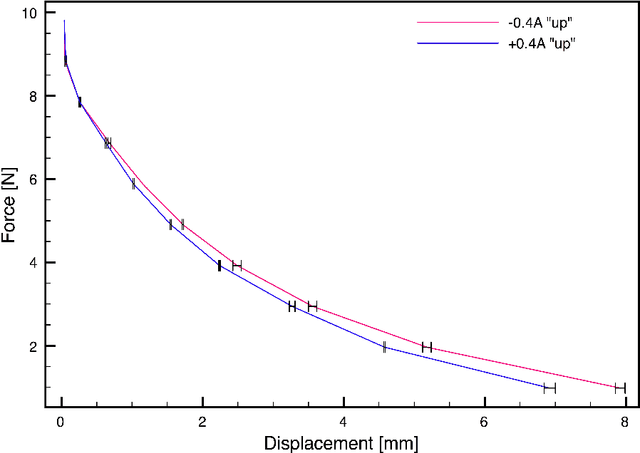
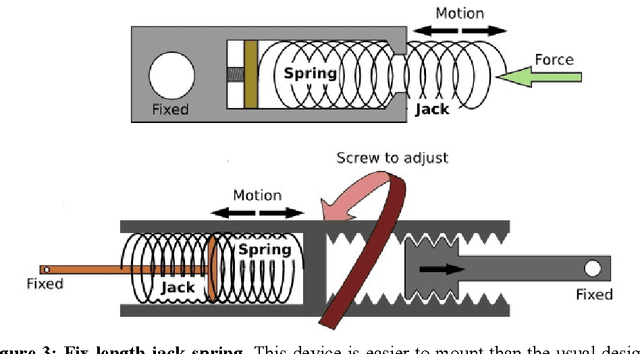
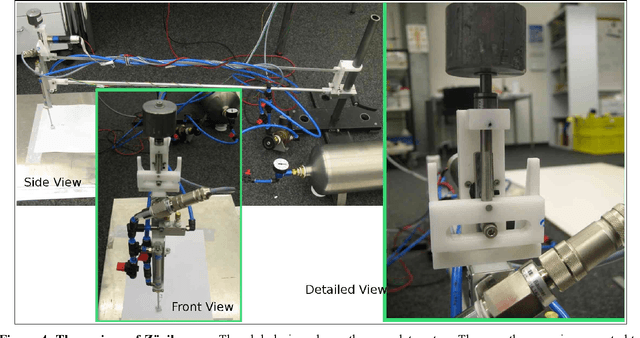
In this paper we present the study of the mathematical model of a real life joint used in an underwater robotic fish. Fluid-structure interaction is utterly simplified and the motion of the joint is approximated by D\"uffing's equation. We compare the quality of analytical harmonic solutions previously reported, with the input-output relation obtained via truncated Volterra series expansion. Comparisons show a trade-off between accuracy and flexibility of the methods. The methods are discussed in detail in order to facilitate reproduction of our results. The approach presented herein can be used to verify results in nonlinear resonance applications and in the design of bio-inspired compliant robots that exploit passive properties of their dynamics. We focus on the potential use of this type of joint for energy extraction from environmental sources, in this case a K\'arm\'an vortex street shed by an obstacle in a flow. Open challenges and questions are mentioned throughout the document.
SNF Project Locomotion: Progress report 2008-2009
Aug 22, 2011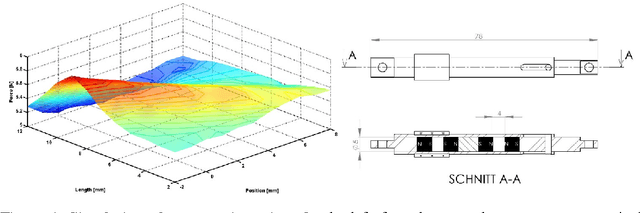
Summary of results (project period 1. 10. 2008 - 30. 9. 2009) of SNFS Project "From locomotion to cognition" The research that we have been involved in, and will continue to do, starts from the insight that in order to understand and design intelligent behavior, we must adopt an embodied perspective, i.e. we must take the entire agent, including its shape or morphology, the materials out of which it is built, and its interaction with the environment into account, in addition to the neural control. A lot of our research in the past has been on relatively low-level sensory-motor tasks such as locomotion (e.g. walking, running, jumping), navigation, and grasping. While this research is of interest in itself, in the context of artificial intelligence and cognitive science, this leads to the question of what these kinds of tasks have to do with higher levels of cognition, or to put it more provocatively, "What does walking have to do with thinking?" This question is of course reminiscent of the notorious "symbol grounding problem". In contrast to most of the research on symbol grounding, we propose to exploit the dynamic interaction between the embodied agent and the environment as the basis for grounding. We use the term "morphological computation" to designate the fact that some of the control or computation can be taken over by the dynamic interaction derived from morphological properties (e.g. the passive forward swing of the leg in walking, the spring-like properties of the muscles, and the weight distribution). By taking morphological computation into account, an agent will be able to achieve not only faster, more robust, and more energy-efficient behavior, but also more situated exploration by the agent for the comprehensive understanding of the environment.
SNF Project Locomotion: Final report 2009-2010
Aug 22, 2011
Summary of results in last project period (1. 10. 2009 - 30. 9. 2010) of SNFS Project "From locomotion to cognition" The research that we have been involved in, and will continue to do, starts from the insight that in order to understand and design intelligent behavior, we must adopt an embodied perspective, i.e. we must take the entire agent, including its shape or morphology, the materials out of which it is built, and its interaction with the environment into account, in addition to the neural control. A lot of our research in the past has been on relatively low-level sensory-motor tasks such as locomotion (e.g. walking, running, jumping), navigation, and grasping. While this research is of interest in itself, in the context of artificial intelligence and cognitive science, this leads to the question of what these kinds of tasks have to do with higher levels of cognition, or to put it more provocatively, "What does walking have to do with thinking?" This question is of course reminiscent of the notorious "symbol grounding problem". In contrast to most of the research on symbol grounding, we propose to exploit the dynamic interaction between the embodied agent and the environment as the basis for grounding. We use the term "morphological computation" to designate the fact that some of the control or computation can be taken over by the dynamic interaction derived from morphological properties (e.g. the passive forward swing of the leg in walking, the spring-like properties of the muscles, and the weight distribution). By taking morphological computation into account, an agent will be able to achieve not only faster, more robust, and more energy-efficient behavior, but also more situated exploration by the agent for the comprehensive understanding of the environment.