 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDIB-R++: Learning to Predict Lighting and Material with a Hybrid Differentiable Renderer
Oct 30, 2021
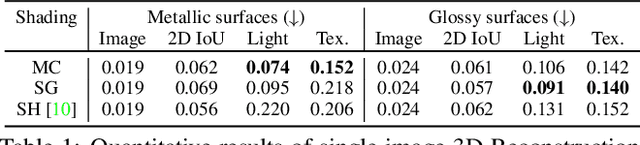


We consider the challenging problem of predicting intrinsic object properties from a single image by exploiting differentiable renderers. Many previous learning-based approaches for inverse graphics adopt rasterization-based renderers and assume naive lighting and material models, which often fail to account for non-Lambertian, specular reflections commonly observed in the wild. In this work, we propose DIBR++, a hybrid differentiable renderer which supports these photorealistic effects by combining rasterization and ray-tracing, taking the advantage of their respective strengths -- speed and realism. Our renderer incorporates environmental lighting and spatially-varying material models to efficiently approximate light transport, either through direct estimation or via spherical basis functions. Compared to more advanced physics-based differentiable renderers leveraging path tracing, DIBR++ is highly performant due to its compact and expressive shading model, which enables easy integration with learning frameworks for geometry, reflectance and lighting prediction from a single image without requiring any ground-truth. We experimentally demonstrate that our approach achieves superior material and lighting disentanglement on synthetic and real data compared to existing rasterization-based approaches and showcase several artistic applications including material editing and relighting.
Neural Geometric Level of Detail: Real-time Rendering with Implicit 3D Shapes
Jan 26, 2021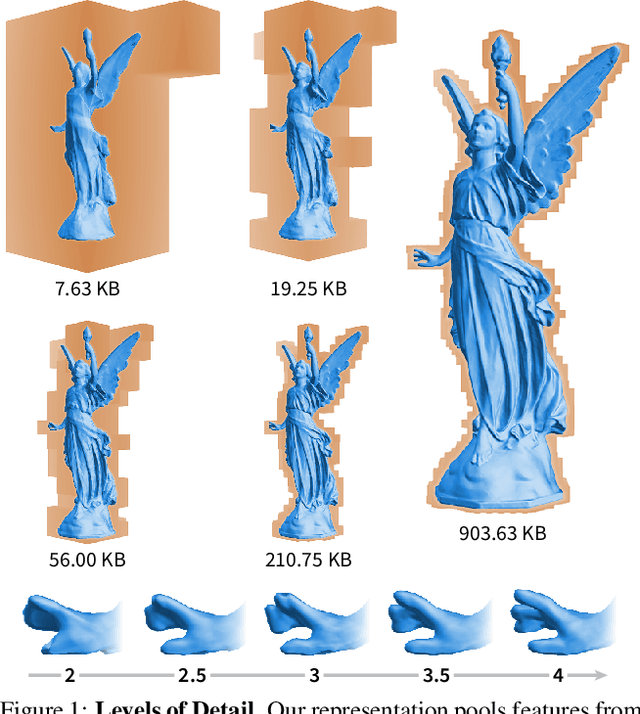
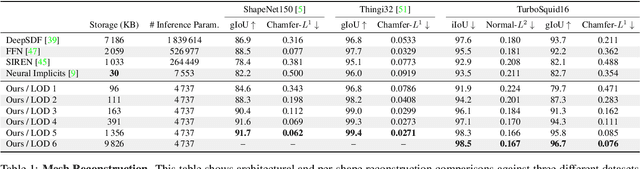
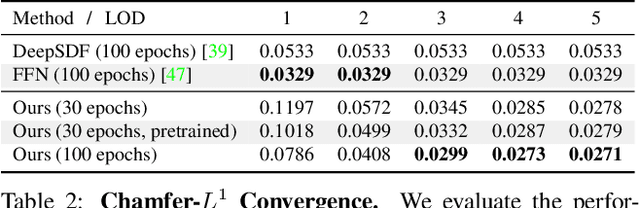
Neural signed distance functions (SDFs) are emerging as an effective representation for 3D shapes. State-of-the-art methods typically encode the SDF with a large, fixed-size neural network to approximate complex shapes with implicit surfaces. Rendering with these large networks is, however, computationally expensive since it requires many forward passes through the network for every pixel, making these representations impractical for real-time graphics. We introduce an efficient neural representation that, for the first time, enables real-time rendering of high-fidelity neural SDFs, while achieving state-of-the-art geometry reconstruction quality. We represent implicit surfaces using an octree-based feature volume which adaptively fits shapes with multiple discrete levels of detail (LODs), and enables continuous LOD with SDF interpolation. We further develop an efficient algorithm to directly render our novel neural SDF representation in real-time by querying only the necessary LODs with sparse octree traversal. We show that our representation is 2-3 orders of magnitude more efficient in terms of rendering speed compared to previous works. Furthermore, it produces state-of-the-art reconstruction quality for complex shapes under both 3D geometric and 2D image-space metrics.