 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFirst Proof
Feb 05, 2026To assess the ability of current AI systems to correctly answer research-level mathematics questions, we share a set of ten math questions which have arisen naturally in the research process of the authors. The questions had not been shared publicly until now; the answers are known to the authors of the questions but will remain encrypted for a short time.
Multi-context principal component analysis
Jan 21, 2026Principal component analysis (PCA) is a tool to capture factors that explain variation in data. Across domains, data are now collected across multiple contexts (for example, individuals with different diseases, cells of different types, or words across texts). While the factors explaining variation in data are undoubtedly shared across subsets of contexts, no tools currently exist to systematically recover such factors. We develop multi-context principal component analysis (MCPCA), a theoretical and algorithmic framework that decomposes data into factors shared across subsets of contexts. Applied to gene expression, MCPCA reveals axes of variation shared across subsets of cancer types and an axis whose variability in tumor cells, but not mean, is associated with lung cancer progression. Applied to contextualized word embeddings from language models, MCPCA maps stages of a debate on human nature, revealing a discussion between science and fiction over decades. These axes are not found by combining data across contexts or by restricting to individual contexts. MCPCA is a principled generalization of PCA to address the challenge of understanding factors underlying data across contexts.
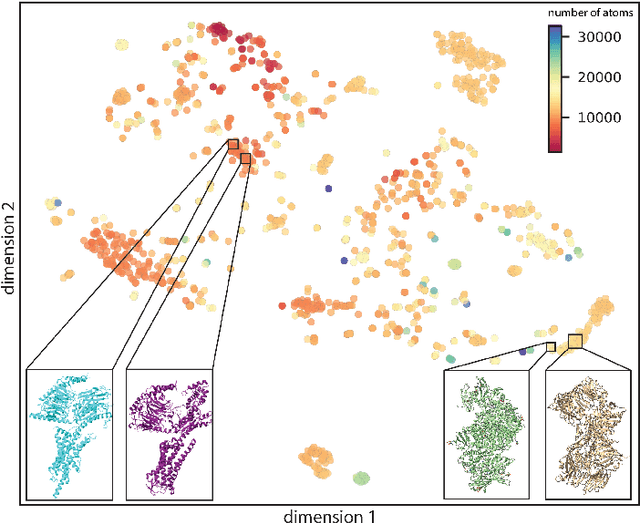
SO(3)-invariant PCA with application to molecular data
Oct 21, 2025Principal component analysis (PCA) is a fundamental technique for dimensionality reduction and denoising; however, its application to three-dimensional data with arbitrary orientations -- common in structural biology -- presents significant challenges. A naive approach requires augmenting the dataset with many rotated copies of each sample, incurring prohibitive computational costs. In this paper, we extend PCA to 3D volumetric datasets with unknown orientations by developing an efficient and principled framework for SO(3)-invariant PCA that implicitly accounts for all rotations without explicit data augmentation. By exploiting underlying algebraic structure, we demonstrate that the computation involves only the square root of the total number of covariance entries, resulting in a substantial reduction in complexity. We validate the method on real-world molecular datasets, demonstrating its effectiveness and opening up new possibilities for large-scale, high-dimensional reconstruction problems.
Higher-Order Group Synchronization
May 28, 2025Group synchronization is the problem of determining reliable global estimates from noisy local measurements on networks. The typical task for group synchronization is to assign elements of a group to the nodes of a graph in a way that respects group elements given on the edges which encode information about local pairwise relationships between the nodes. In this paper, we introduce a novel higher-order group synchronization problem which operates on a hypergraph and seeks to synchronize higher-order local measurements on the hyperedges to obtain global estimates on the nodes. Higher-order group synchronization is motivated by applications to computer vision and image processing, among other computational problems. First, we define the problem of higher-order group synchronization and discuss its mathematical foundations. Specifically, we give necessary and sufficient synchronizability conditions which establish the importance of cycle consistency in higher-order group synchronization. Then, we propose the first computational framework for general higher-order group synchronization; it acts globally and directly on higher-order measurements using a message passing algorithm. We discuss theoretical guarantees for our framework, including convergence analyses under outliers and noise. Finally, we show potential advantages of our method through numerical experiments. In particular, we show that in certain cases our higher-order method applied to rotational and angular synchronization outperforms standard pairwise synchronization methods and is more robust to outliers. We also show that our method has comparable performance on simulated cryo-electron microscopy (cryo-EM) data compared to a standard cryo-EM reconstruction package.
Geometry and Optimization of Shallow Polynomial Networks
Jan 10, 2025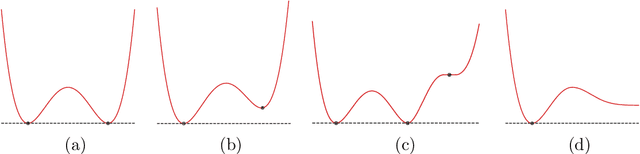
We study shallow neural networks with polynomial activations. The function space for these models can be identified with a set of symmetric tensors with bounded rank. We describe general features of these networks, focusing on the relationship between width and optimization. We then consider teacher-student problems, that can be viewed as a problem of low-rank tensor approximation with respect to a non-standard inner product that is induced by the data distribution. In this setting, we introduce a teacher-metric discriminant which encodes the qualitative behavior of the optimization as a function of the training data distribution. Finally, we focus on networks with quadratic activations, presenting an in-depth analysis of the optimization landscape. In particular, we present a variation of the Eckart-Young Theorem characterizing all critical points and their Hessian signatures for teacher-student problems with quadratic networks and Gaussian training data.
Tensor-Based Synchronization and the Low-Rankness of the Block Trifocal Tensor
Sep 14, 2024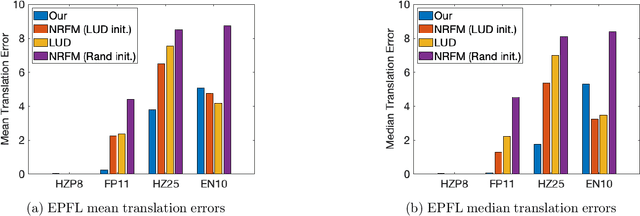
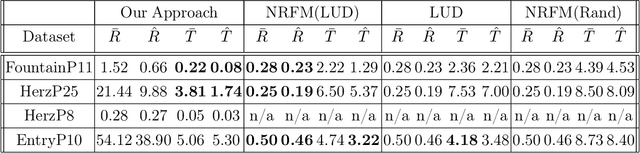
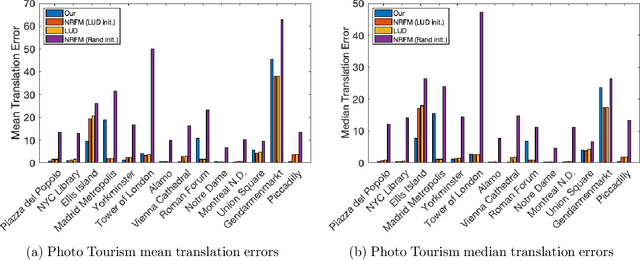
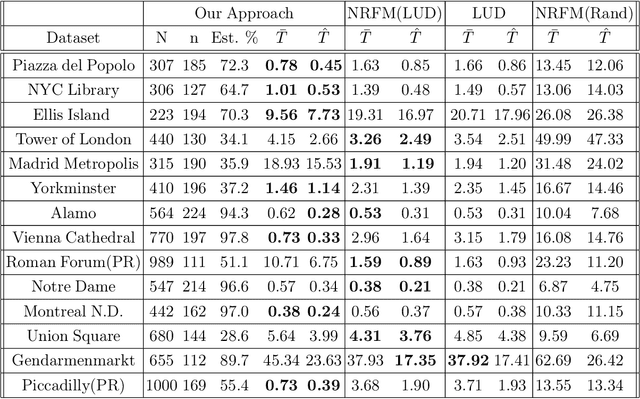
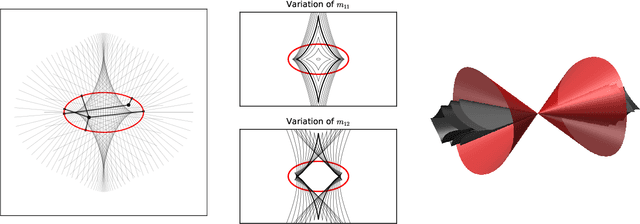
The block tensor of trifocal tensors provides crucial geometric information on the three-view geometry of a scene. The underlying synchronization problem seeks to recover camera poses (locations and orientations up to a global transformation) from the block trifocal tensor. We establish an explicit Tucker factorization of this tensor, revealing a low multilinear rank of $(6,4,4)$ independent of the number of cameras under appropriate scaling conditions. We prove that this rank constraint provides sufficient information for camera recovery in the noiseless case. The constraint motivates a synchronization algorithm based on the higher-order singular value decomposition of the block trifocal tensor. Experimental comparisons with state-of-the-art global synchronization methods on real datasets demonstrate the potential of this algorithm for significantly improving location estimation accuracy. Overall this work suggests that higher-order interactions in synchronization problems can be exploited to improve performance, beyond the usual pairwise-based approaches.
Moment-based metrics for molecules computable from cryo-EM images
Jan 26, 2024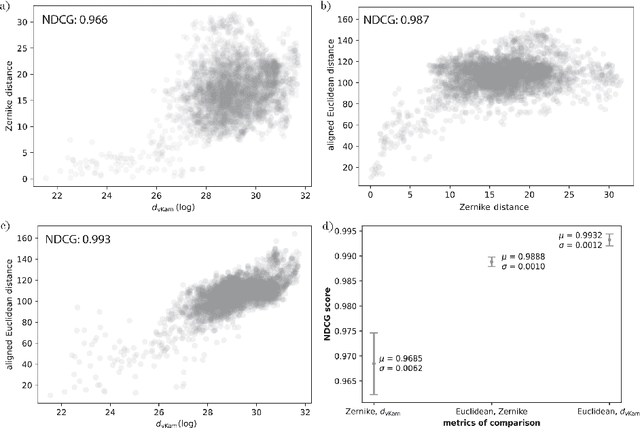
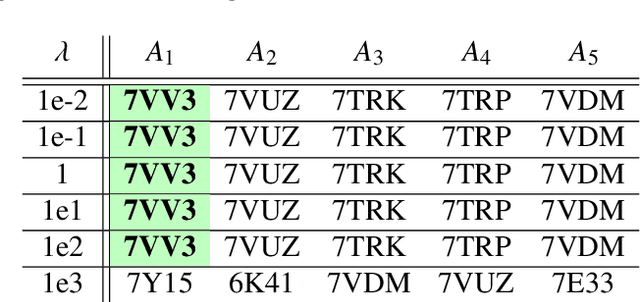
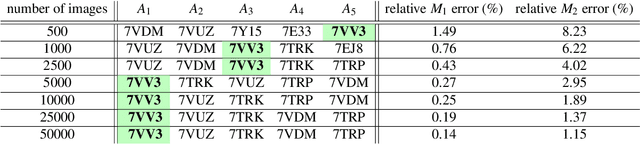
Single particle cryogenic electron microscopy (cryo-EM) is an imaging technique capable of recovering the high-resolution 3-D structure of biological macromolecules from many noisy and randomly oriented projection images. One notable approach to 3-D reconstruction, known as Kam's method, relies on the moments of the 2-D images. Inspired by Kam's method, we introduce a rotationally invariant metric between two molecular structures, which does not require 3-D alignment. Further, we introduce a metric between a stack of projection images and a molecular structure, which is invariant to rotations and reflections and does not require performing 3-D reconstruction. Additionally, the latter metric does not assume a uniform distribution of viewing angles. We demonstrate uses of the new metrics on synthetic and experimental datasets, highlighting their ability to measure structural similarity.
Covering Number of Real Algebraic Varieties and Beyond: Improved Bounds and Applications
Nov 16, 2023We prove an upper bound on the covering number of real algebraic varieties, images of polynomial maps and semialgebraic sets. The bound remarkably improves the best known general bound by Yomdin-Comte, and its proof is much more straightforward. As a consequence, our result gives new bounds on the volume of the tubular neighborhood of the image of a polynomial map and a semialgebraic set, where results for varieties by Lotz and Basu-Lerario are not directly applicable. We apply our theory to three main application domains. Firstly, we derive a near-optimal bound on the covering number of low rank CP tensors. Secondly, we prove a bound on the sketching dimension for (general) polynomial optimization problems. Lastly, we deduce generalization error bounds for deep neural networks with rational or ReLU activations, improving or matching the best known results in the literature.
Condition numbers in multiview geometry, instability in relative pose estimation, and RANSAC
Oct 04, 2023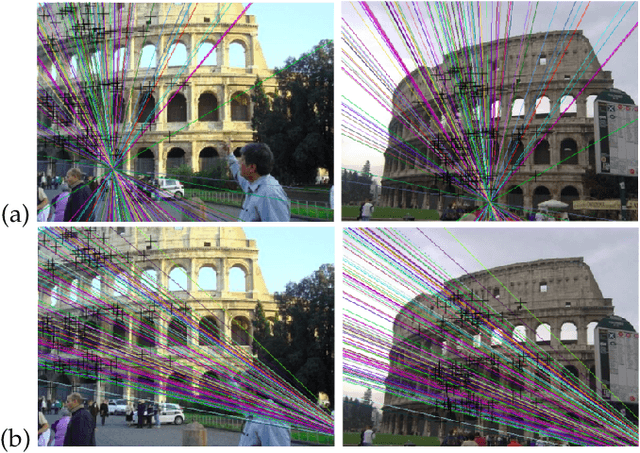

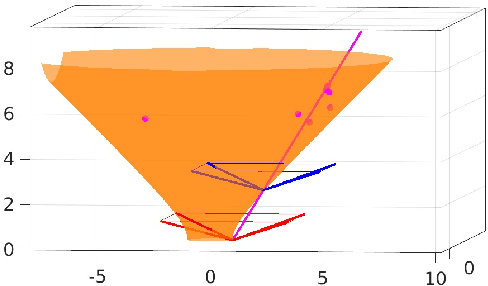

In this paper we introduce a general framework for analyzing the numerical conditioning of minimal problems in multiple view geometry, using tools from computational algebra and Riemannian geometry. Special motivation comes from the fact that relative pose estimation, based on standard 5-point or 7-point Random Sample Consensus (RANSAC) algorithms, can fail even when no outliers are present and there is enough data to support a hypothesis. We argue that these cases arise due to the intrinsic instability of the 5- and 7-point minimal problems. We apply our framework to characterize the instabilities, both in terms of the world scenes that lead to infinite condition number, and directly in terms of ill-conditioned image data. The approach produces computational tests for assessing the condition number before solving the minimal problem. Lastly synthetic and real data experiments suggest that RANSAC serves not only to remove outliers, but also to select for well-conditioned image data, as predicted by our theory.
Diffusion Maps for Group-Invariant Manifolds
Apr 03, 2023In this article, we consider the manifold learning problem when the data set is invariant under the action of a compact Lie group $K$. Our approach consists in augmenting the data-induced graph Laplacian by integrating over the $K$-orbits of the existing data points, which yields a $K$-invariant graph Laplacian $L$. We prove that $L$ can be diagonalized by using the unitary irreducible representation matrices of $K$, and we provide an explicit formula for computing its eigenvalues and eigenfunctions. In addition, we show that the normalized Laplacian operator $L_N$ converges to the Laplace-Beltrami operator of the data manifold with an improved convergence rate, where the improvement grows with the dimension of the symmetry group $K$. This work extends the steerable graph Laplacian framework of Landa and Shkolnisky from the case of $\operatorname{SO}(2)$ to arbitrary compact Lie groups.