 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhole-examination AI estimation of fetal biometrics from 20-week ultrasound scans
Jan 02, 2024The current approach to fetal anomaly screening is based on biometric measurements derived from individually selected ultrasound images. In this paper, we introduce a paradigm shift that attains human-level performance in biometric measurement by aggregating automatically extracted biometrics from every frame across an entire scan, with no need for operator intervention. We use a convolutional neural network to classify each frame of an ultrasound video recording. We then measure fetal biometrics in every frame where appropriate anatomy is visible. We use a Bayesian method to estimate the true value of each biometric from a large number of measurements and probabilistically reject outliers. We performed a retrospective experiment on 1457 recordings (comprising 48 million frames) of 20-week ultrasound scans, estimated fetal biometrics in those scans and compared our estimates to the measurements sonographers took during the scan. Our method achieves human-level performance in estimating fetal biometrics and estimates well-calibrated credible intervals in which the true biometric value is expected to lie.
{kind=link}
Computing CNN Loss and Gradients for Pose Estimation with Riemannian Geometry
Jul 17, 2018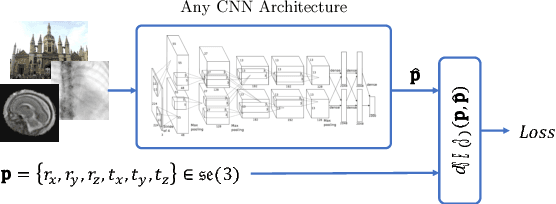
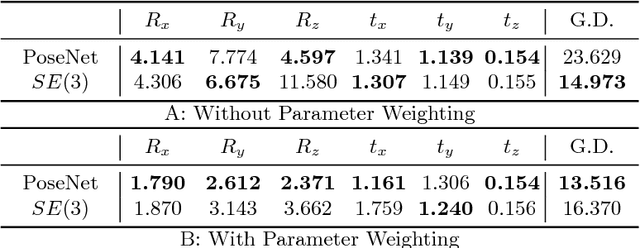
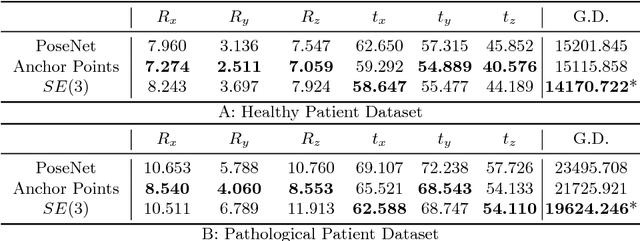

Pose estimation, i.e. predicting a 3D rigid transformation with respect to a fixed co-ordinate frame in, SE(3), is an omnipresent problem in medical image analysis with applications such as: image rigid registration, anatomical standard plane detection, tracking and device/camera pose estimation. Deep learning methods often parameterise a pose with a representation that separates rotation and translation. As commonly available frameworks do not provide means to calculate loss on a manifold, regression is usually performed using the L2-norm independently on the rotation's and the translation's parameterisations, which is a metric for linear spaces that does not take into account the Lie group structure of SE(3). In this paper, we propose a general Riemannian formulation of the pose estimation problem. We propose to train the CNN directly on SE(3) equipped with a left-invariant Riemannian metric, coupling the prediction of the translation and rotation defining the pose. At each training step, the ground truth and predicted pose are elements of the manifold, where the loss is calculated as the Riemannian geodesic distance. We then compute the optimisation direction by back-propagating the gradient with respect to the predicted pose on the tangent space of the manifold SE(3) and update the network weights. We thoroughly evaluate the effectiveness of our loss function by comparing its performance with popular and most commonly used existing methods, on tasks such as image-based localisation and intensity-based 2D/3D registration. We also show that hyper-parameters, used in our loss function to weight the contribution between rotations and translations, can be intrinsically calculated from the dataset to achieve greater performance margins.
3D Reconstruction in Canonical Co-ordinate Space from Arbitrarily Oriented 2D Images
Jan 23, 2018


Limited capture range, and the requirement to provide high quality initialization for optimization-based 2D/3D image registration methods, can significantly degrade the performance of 3D image reconstruction and motion compensation pipelines. Challenging clinical imaging scenarios, which contain significant subject motion such as fetal in-utero imaging, complicate the 3D image and volume reconstruction process. In this paper we present a learning based image registration method capable of predicting 3D rigid transformations of arbitrarily oriented 2D image slices, with respect to a learned canonical atlas co-ordinate system. Only image slice intensity information is used to perform registration and canonical alignment, no spatial transform initialization is required. To find image transformations we utilize a Convolutional Neural Network (CNN) architecture to learn the regression function capable of mapping 2D image slices to a 3D canonical atlas space. We extensively evaluate the effectiveness of our approach quantitatively on simulated Magnetic Resonance Imaging (MRI), fetal brain imagery with synthetic motion and further demonstrate qualitative results on real fetal MRI data where our method is integrated into a full reconstruction and motion compensation pipeline. Our learning based registration achieves an average spatial prediction error of 7 mm on simulated data and produces qualitatively improved reconstructions for heavily moving fetuses with gestational ages of approximately 20 weeks. Our model provides a general and computationally efficient solution to the 2D/3D registration initialization problem and is suitable for real-time scenarios.
Context-Sensitive Super-Resolution for Fast Fetal Magnetic Resonance Imaging
Sep 23, 2017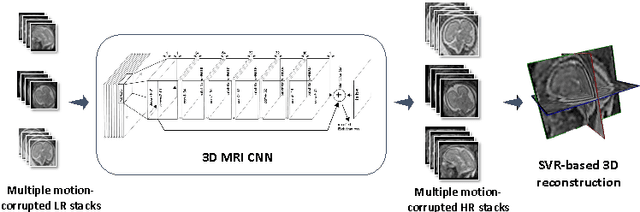



3D Magnetic Resonance Imaging (MRI) is often a trade-off between fast but low-resolution image acquisition and highly detailed but slow image acquisition. Fast imaging is required for targets that move to avoid motion artefacts. This is in particular difficult for fetal MRI. Spatially independent upsampling techniques, which are the state-of-the-art to address this problem, are error prone and disregard contextual information. In this paper we propose a context-sensitive upsampling method based on a residual convolutional neural network model that learns organ specific appearance and adopts semantically to input data allowing for the generation of high resolution images with sharp edges and fine scale detail. By making contextual decisions about appearance and shape, present in different parts of an image, we gain a maximum of structural detail at a similar contrast as provided by high-resolution data. We experiment on $145$ fetal scans and show that our approach yields an increased PSNR of $1.25$ $dB$ when applied to under-sampled fetal data \emph{cf.} baseline upsampling. Furthermore, our method yields an increased PSNR of $1.73$ $dB$ when utilizing under-sampled fetal data to perform brain volume reconstruction on motion corrupted captured data.
* 11 pages, 6 figures, published in Proc MICCAI RAMBO'17 https://link.springer.com/chapter/10.1007/978-3-319-67564-0_12
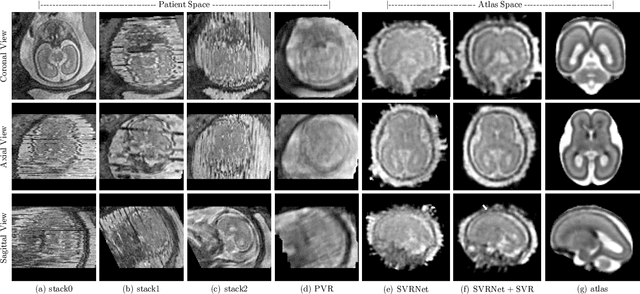
Predicting Slice-to-Volume Transformation in Presence of Arbitrary Subject Motion
Mar 04, 2017
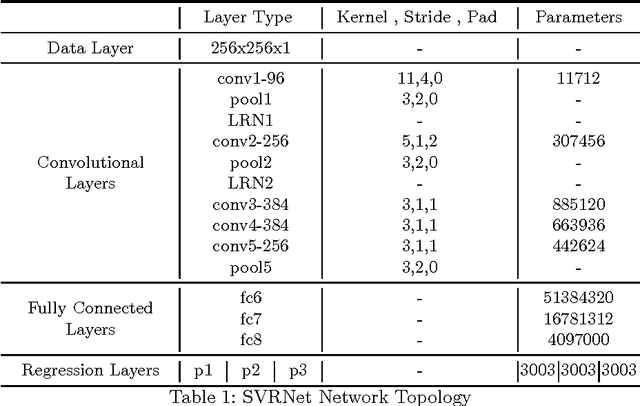


This paper aims to solve a fundamental problem in intensity-based 2D/3D registration, which concerns the limited capture range and need for very good initialization of state-of-the-art image registration methods. We propose a regression approach that learns to predict rotation and translations of arbitrary 2D image slices from 3D volumes, with respect to a learned canonical atlas co-ordinate system. To this end, we utilize Convolutional Neural Networks (CNNs) to learn the highly complex regression function that maps 2D image slices into their correct position and orientation in 3D space. Our approach is attractive in challenging imaging scenarios, where significant subject motion complicates reconstruction performance of 3D volumes from 2D slice data. We extensively evaluate the effectiveness of our approach quantitatively on simulated MRI brain data with extreme random motion. We further demonstrate qualitative results on fetal MRI where our method is integrated into a full reconstruction and motion compensation pipeline. With our CNN regression approach we obtain an average prediction error of 7mm on simulated data, and convincing reconstruction quality of images of very young fetuses where previous methods fail. We further discuss applications to Computed Tomography and X-ray projections. Our approach is a general solution to the 2D/3D initialization problem. It is computationally efficient, with prediction times per slice of a few milliseconds, making it suitable for real-time scenarios.