 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Discovery via Contrastive Learning for Weakly Supervised Object Detection
Aug 16, 2022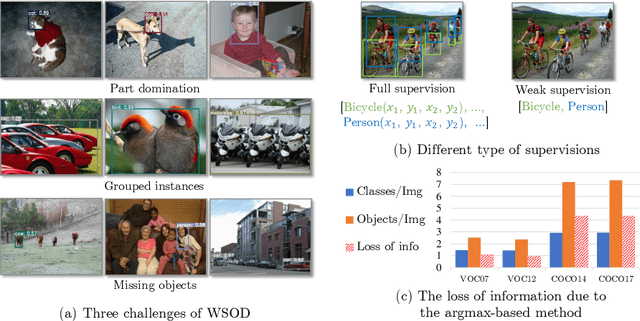

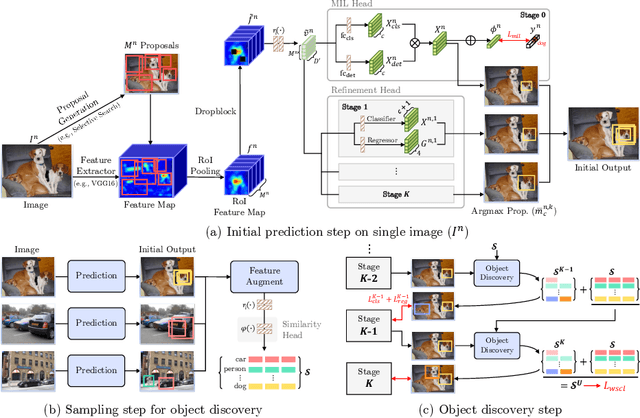
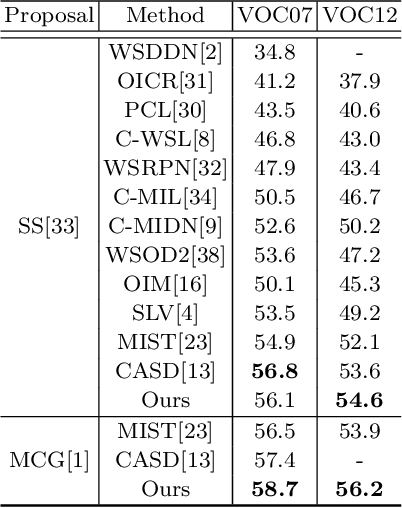
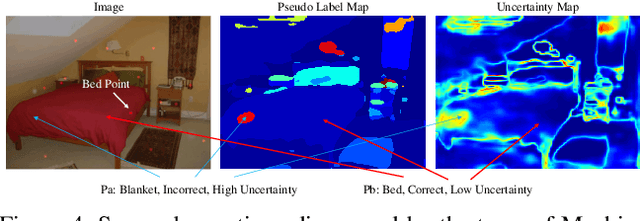
Weakly Supervised Object Detection (WSOD) is a task that detects objects in an image using a model trained only on image-level annotations. Current state-of-the-art models benefit from self-supervised instance-level supervision, but since weak supervision does not include count or location information, the most common ``argmax'' labeling method often ignores many instances of objects. To alleviate this issue, we propose a novel multiple instance labeling method called object discovery. We further introduce a new contrastive loss under weak supervision where no instance-level information is available for sampling, called weakly supervised contrastive loss (WSCL). WSCL aims to construct a credible similarity threshold for object discovery by leveraging consistent features for embedding vectors in the same class. As a result, we achieve new state-of-the-art results on MS-COCO 2014 and 2017 as well as PASCAL VOC 2012, and competitive results on PASCAL VOC 2007.
LID 2020: The Learning from Imperfect Data Challenge Results
Oct 17, 2020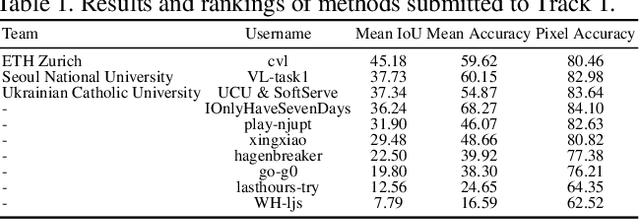
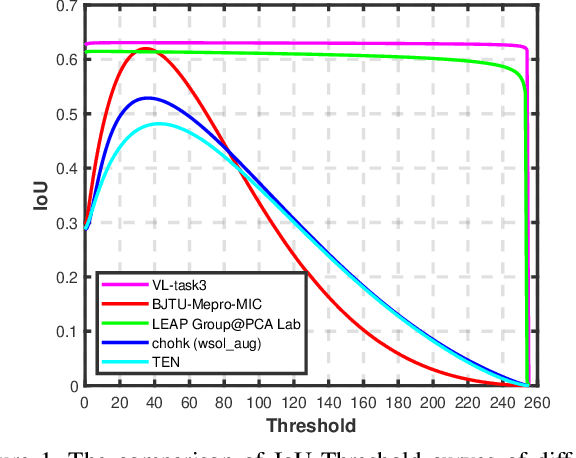
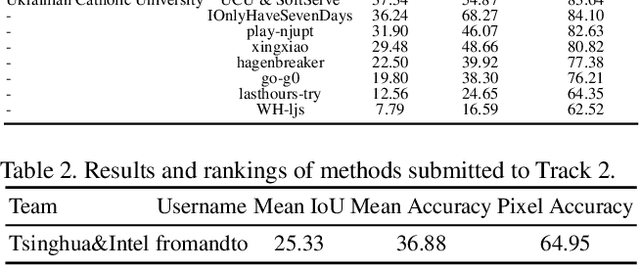
Learning from imperfect data becomes an issue in many industrial applications after the research community has made profound progress in supervised learning from perfectly annotated datasets. The purpose of the Learning from Imperfect Data (LID) workshop is to inspire and facilitate the research in developing novel approaches that would harness the imperfect data and improve the data-efficiency during training. A massive amount of user-generated data nowadays available on multiple internet services. How to leverage those and improve the machine learning models is a high impact problem. We organize the challenges in conjunction with the workshop. The goal of these challenges is to find the state-of-the-art approaches in the weakly supervised learning setting for object detection, semantic segmentation, and scene parsing. There are three tracks in the challenge, i.e., weakly supervised semantic segmentation (Track 1), weakly supervised scene parsing (Track 2), and weakly supervised object localization (Track 3). In Track 1, based on ILSVRC DET, we provide pixel-level annotations of 15K images from 200 categories for evaluation. In Track 2, we provide point-based annotations for the training set of ADE20K. In Track 3, based on ILSVRC CLS-LOC, we provide pixel-level annotations of 44,271 images for evaluation. Besides, we further introduce a new evaluation metric proposed by \cite{zhang2020rethinking}, i.e., IoU curve, to measure the quality of the generated object localization maps. This technical report summarizes the highlights from the challenge. The challenge submission server and the leaderboard will continue to open for the researchers who are interested in it. More details regarding the challenge and the benchmarks are available at https://lidchallenge.github.io