 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEasz: An Agile Transformer-based Image Compression Framework for Resource-constrained IoTs
May 03, 2025Neural image compression, necessary in various machine-to-machine communication scenarios, suffers from its heavy encode-decode structures and inflexibility in switching between different compression levels. Consequently, it raises significant challenges in applying the neural image compression to edge devices that are developed for powerful servers with high computational and storage capacities. We take a step to solve the challenges by proposing a new transformer-based edge-compute-free image coding framework called Easz. Easz shifts the computational overhead to the server, and hence avoids the heavy encoding and model switching overhead on the edge. Easz utilizes a patch-erase algorithm to selectively remove image contents using a conditional uniform-based sampler. The erased pixels are reconstructed on the receiver side through a transformer-based framework. To further reduce the computational overhead on the receiver, we then introduce a lightweight transformer-based reconstruction structure to reduce the reconstruction load on the receiver side. Extensive evaluations conducted on a real-world testbed demonstrate multiple advantages of Easz over existing compression approaches, in terms of adaptability to different compression levels, computational efficiency, and image reconstruction quality.
Echo: Simulating Distributed Training At Scale
Dec 17, 2024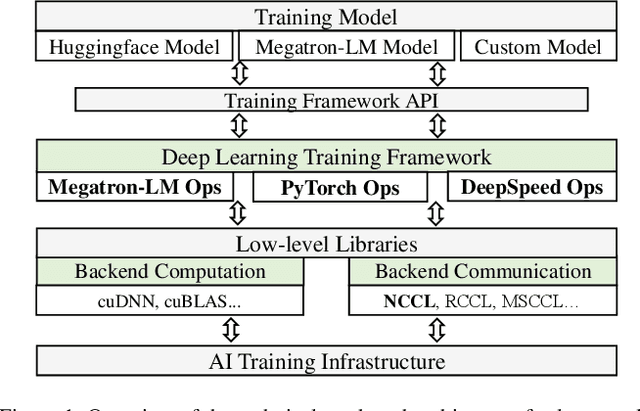
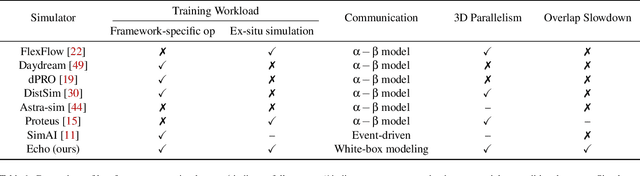

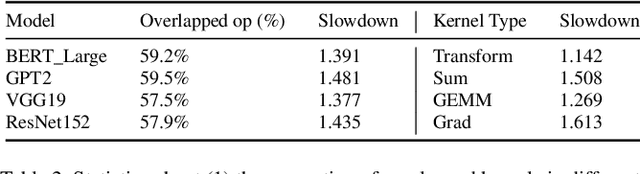
Simulation offers unique values for both enumeration and extrapolation purposes, and is becoming increasingly important for managing the massive machine learning (ML) clusters and large-scale distributed training jobs. In this paper, we build Echo to tackle three key challenges in large-scale training simulation: (1) tracing the runtime training workloads at each device in an ex-situ fashion so we can use a single device to obtain the actual execution graphs of 1K-GPU training, (2) accurately estimating the collective communication without high overheads of discrete-event based network simulation, and (3) accounting for the interference-induced computation slowdown from overlapping communication and computation kernels on the same device. Echo delivers on average 8% error in training step -- roughly 3x lower than state-of-the-art simulators -- for GPT-175B on a 96-GPU H800 cluster with 3D parallelism on Megatron-LM under 2 minutes.
2D-Empowered 3D Object Detection on the Edge
Feb 18, 2023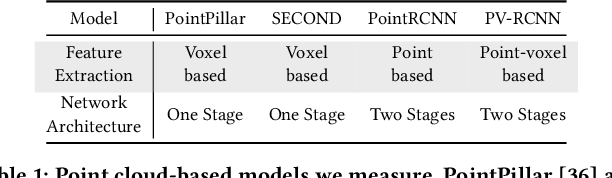
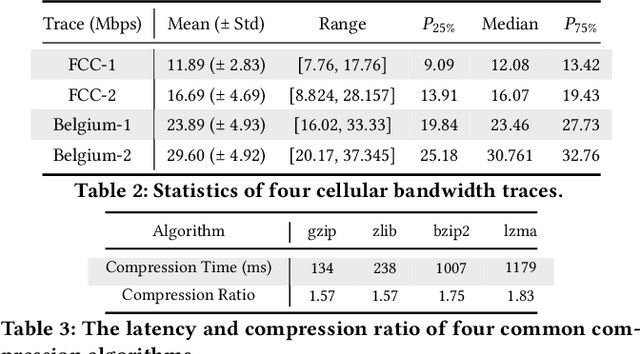
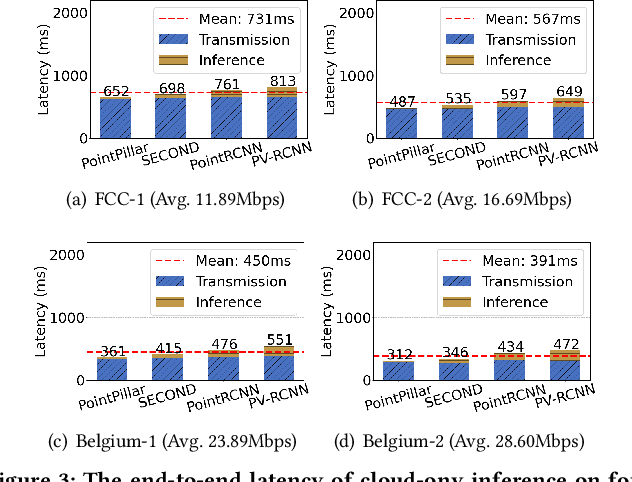
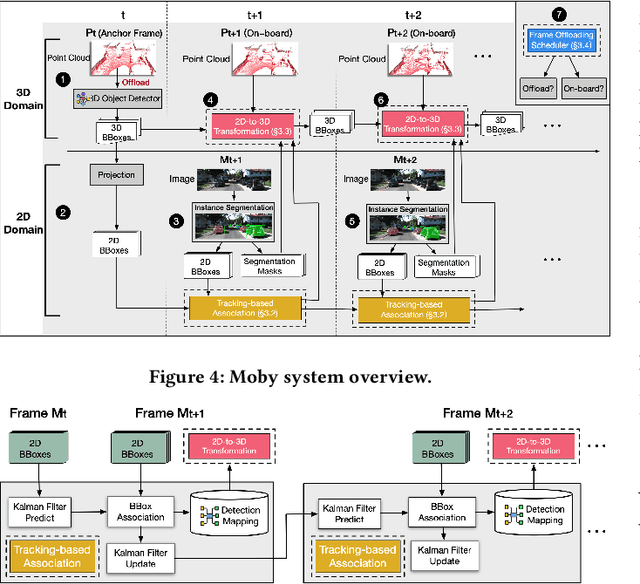
3D object detection has a pivotal role in a wide range of applications, most notably autonomous driving and robotics. These applications are commonly deployed on edge devices to promptly interact with the environment, and often require near real-time response. With limited computation power, it is challenging to execute 3D detection on the edge using highly complex neural networks. Common approaches such as offloading to the cloud brings latency overheads due to the large amount of 3D point cloud data during transmission. To resolve the tension between wimpy edge devices and compute-intensive inference workloads, we explore the possibility of transforming fast 2D detection results to extrapolate 3D bounding boxes. To this end, we present Moby, a novel system that demonstrates the feasibility and potential of our approach. Our main contributions are two-fold: First, we design a 2D-to-3D transformation pipeline that takes as input the point cloud data from LiDAR and 2D bounding boxes from camera that are captured at exactly the same time, and generate 3D bounding boxes efficiently and accurately based on detection results of the previous frames without running 3D detectors. Second, we design a frame offloading scheduler that dynamically launches a 3D detection when the error of 2D-to-3D transformation accumulates to a certain level, so the subsequent transformations can draw upon the latest 3D detection results with better accuracy. Extensive evaluation on NVIDIA Jetson TX2 with the autonomous driving dataset KITTI and real-world 4G/LTE traces shows that, Moby reduces the end-to-end latency by up to 91.9% with mild accuracy drop compared to baselines. Further, Moby shows excellent energy efficiency by saving power consumption and memory footprint up to 75.7% and 48.1%, respectively.