 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Decoding via Hierarchical Neural Information Gradients in Mouse Visual Tasks
Oct 10, 2025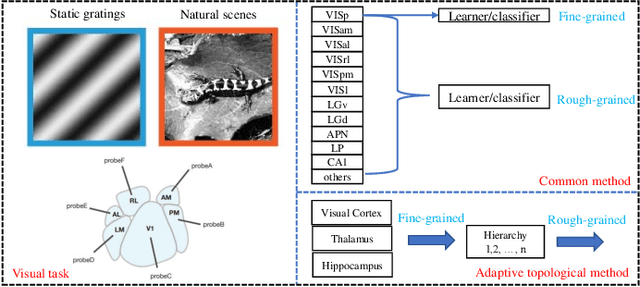
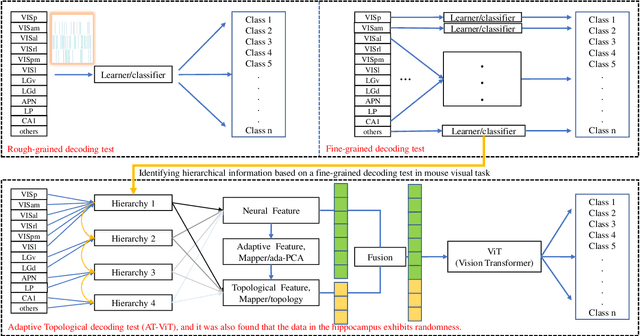
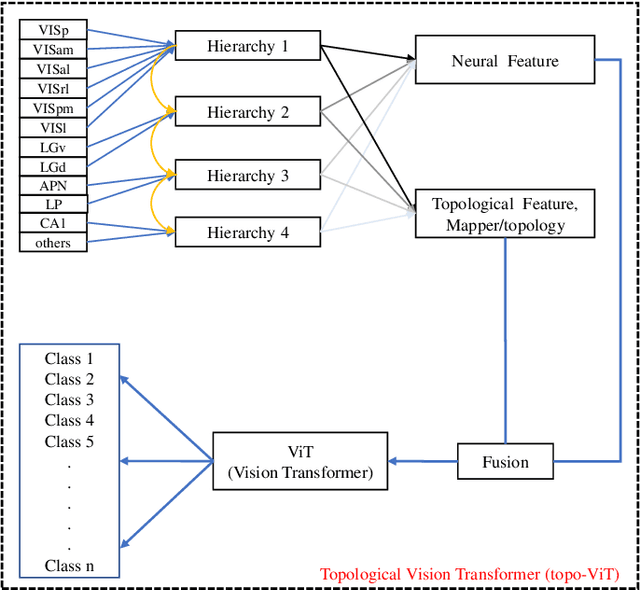
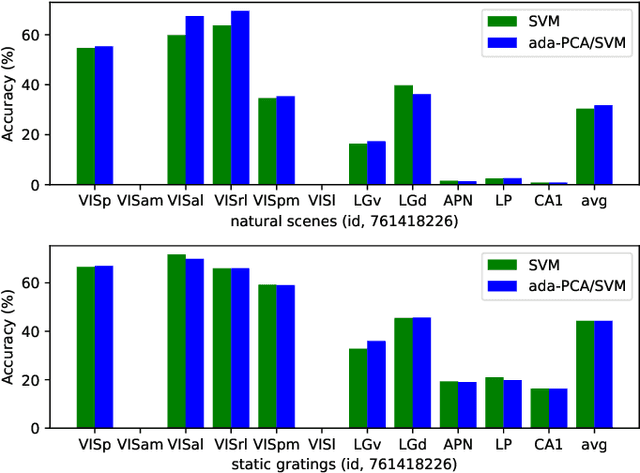
Understanding the encoding and decoding mechanisms of dynamic neural responses to different visual stimuli is an important topic in exploring how the brain represents visual information. Currently, hierarchically deep neural networks (DNNs) have played a significant role as tools for mining the core features of complex data. However, most methods often overlook the dynamic generation process of neural data, such as hierarchical brain's visual data, within the brain's structure. In the decoding of brain's visual data, two main paradigms are 'fine-grained decoding tests' and 'rough-grained decoding tests', which we define as focusing on a single brain region and studying the overall structure across multiple brain regions, respectively. In this paper, we mainly use the Visual Coding Neuropixel dataset from the Allen Brain Institute, and the hierarchical information extracted from some single brain regions (i.e., fine-grained decoding tests) is provided to the proposed method for studying the adaptive topological decoding between brain regions, called the Adaptive Topological Vision Transformer, or AT-ViT. In numerous experiments, the results reveal the importance of the proposed method in hierarchical networks in the visual tasks, and also validate the hypothesis that "the hierarchical information content in brain regions of the visual system can be quantified by decoding outcomes to reflect an information hierarchy." Among them, we found that neural data collected in the hippocampus can have a random decoding performance, and this negative impact on performance still holds significant scientific value.
An Algorithm Board in Neural Decoding
Feb 18, 2025Understanding the mechanisms of neural encoding and decoding has always been a highly interesting research topic in fields such as neuroscience and cognitive intelligence. In prior studies, some researchers identified a symmetry in neural data decoded by unsupervised methods in motor scenarios and constructed a cognitive learning system based on this pattern (i.e., symmetry). Nevertheless, the distribution state of the data flow that significantly influences neural decoding positions still remains a mystery within the system, which further restricts the enhancement of the system's interpretability. Based on this, this paper mainly explores changes in the distribution state within the system from the machine learning and mathematical statistics perspectives. In the experiment, we assessed the correctness of this symmetry using various tools and indicators commonly utilized in mathematics and statistics. According to the experimental results, the normal distribution (or Gaussian distribution) plays a crucial role in the decoding of prediction positions within the system. Eventually, an algorithm board similar to the Galton board was built to serve as the mathematical foundation of the discovered symmetry.
LiDAR-based HD Map Localization using Semantic Generalized ICP with Road Marking Detection
Jul 02, 2024In GPS-denied scenarios, a robust environmental perception and localization system becomes crucial for autonomous driving. In this paper, a LiDAR-based online localization system is developed, incorporating road marking detection and registration on a high-definition (HD) map. Within our system, a road marking detection approach is proposed with real-time performance, in which an adaptive segmentation technique is first introduced to isolate high-reflectance points correlated with road markings, enhancing real-time efficiency. Then, a spatio-temporal probabilistic local map is formed by aggregating historical LiDAR scans, providing a dense point cloud. Finally, a LiDAR bird's-eye view (LiBEV) image is generated, and an instance segmentation network is applied to accurately label the road markings. For road marking registration, a semantic generalized iterative closest point (SG-ICP) algorithm is designed. Linear road markings are modeled as 1-manifolds embedded in 2D space, mitigating the influence of constraints along the linear direction, addressing the under-constrained problem and achieving a higher localization accuracy on HD maps than ICP. Extensive experiments are conducted in real-world scenarios, demonstrating the effectiveness and robustness of our system.
Prototypes-oriented Transductive Few-shot Learning with Conditional Transport
Aug 06, 2023Transductive Few-Shot Learning (TFSL) has recently attracted increasing attention since it typically outperforms its inductive peer by leveraging statistics of query samples. However, previous TFSL methods usually encode uniform prior that all the classes within query samples are equally likely, which is biased in imbalanced TFSL and causes severe performance degradation. Given this pivotal issue, in this work, we propose a novel Conditional Transport (CT) based imbalanced TFSL model called {\textbf P}rototypes-oriented {\textbf U}nbiased {\textbf T}ransfer {\textbf M}odel (PUTM) to fully exploit unbiased statistics of imbalanced query samples, which employs forward and backward navigators as transport matrices to balance the prior of query samples per class between uniform and adaptive data-driven distributions. For efficiently transferring statistics learned by CT, we further derive a closed form solution to refine prototypes based on MAP given the learned navigators. The above two steps of discovering and transferring unbiased statistics follow an iterative manner, formulating our EM-based solver. Experimental results on four standard benchmarks including miniImageNet, tieredImageNet, CUB, and CIFAR-FS demonstrate superiority of our model in class-imbalanced generalization.
Grid-SD2E: A General Grid-Feedback in a System for Cognitive Learning
Apr 04, 2023Comprehending how the brain interacts with the external world through generated neural signals is crucial for determining its working mechanism, treating brain diseases, and understanding intelligence. Although many theoretical models have been proposed, they have thus far been difficult to integrate and develop. In this study, we were inspired in part by grid cells in creating a more general and robust grid module and constructing an interactive and self-reinforcing cognitive system together with Bayesian reasoning, an approach called space-division and exploration-exploitation with grid-feedback (Grid-SD2E). Here, a grid module can be used as an interaction medium between the outside world and a system, as well as a self-reinforcement medium within the system. The space-division and exploration-exploitation (SD2E) receives the 0/1 signals of a grid through its space-division (SD) module. The system described in this paper is also a theoretical model derived from experiments conducted by other researchers and our experience on neural decoding. Herein, we analyse the rationality of the system based on the existing theories in both neuroscience and cognitive science, and attempt to propose special and general rules to explain the different interactions between people and between people and the external world. What's more, based on this model, the smallest computing unit is extracted, which is analogous to a single neuron in the brain.
ViF-SD2E: A Robust Weakly-Supervised Method for Neural Decoding
Dec 02, 2021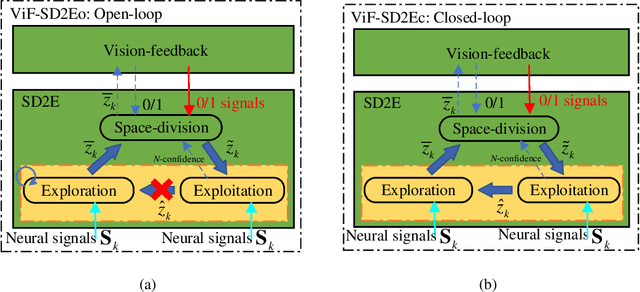
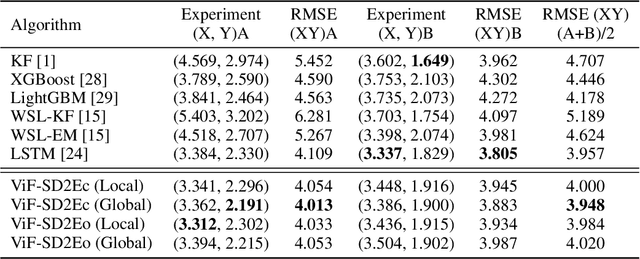
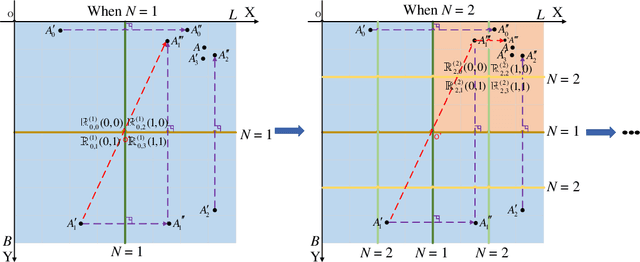
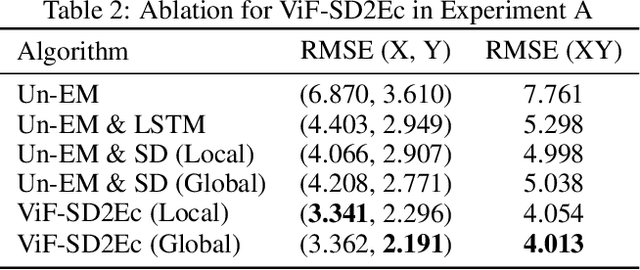
Neural decoding plays a vital role in the interaction between the brain and outside world. In this paper, we directly decode the movement track of the finger based on the neural signals of a macaque. The supervised regression methods may over-fit to actual labels contained with noise and require high labeling cost, while unsupervised approaches often have unsatisfactory accuracy. Besides, the spatial and temporal information are often ignored or not well exploited in these works. This motivates us to propose a robust weakly-supervised method termed ViF-SD2E for neural decoding. In particular, ViF-SD2E consists of a space-division (SD) module and a exploration-exploitation (2E) strategy, to effectively exploit both the spatial information of the outside world and temporal information of neural activity, where the SD2E output is compared with the weak 0/1 vision-feedback (ViF) label for training. Extensive experiments demonstrate the effectiveness of our method, which can be sometimes comparable to the supervised counterparts.