 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNetworking Systems for Video Anomaly Detection: A Tutorial and Survey
May 16, 2024



The increasing prevalence of surveillance cameras in smart cities, coupled with the surge of online video applications, has heightened concerns regarding public security and privacy protection, which propelled automated Video Anomaly Detection (VAD) into a fundamental research task within the Artificial Intelligence (AI) community. With the advancements in deep learning and edge computing, VAD has made significant progress and advances synergized with emerging applications in smart cities and video internet, which has moved beyond the conventional research scope of algorithm engineering to deployable Networking Systems for VAD (NSVAD), a practical hotspot for intersection exploration in the AI, IoVT, and computing fields. In this article, we delineate the foundational assumptions, learning frameworks, and applicable scenarios of various deep learning-driven VAD routes, offering an exhaustive tutorial for novices in NSVAD. This article elucidates core concepts by reviewing recent advances and typical solutions, and aggregating available research resources (e.g., literatures, code, tools, and workshops) accessible at https://github.com/fdjingliu/NSVAD. Additionally, we showcase our latest NSVAD research in industrial IoT and smart cities, along with an end-cloud collaborative architecture for deployable NSVAD to further elucidate its potential scope of research and application. Lastly, this article projects future development trends and discusses how the integration of AI and computing technologies can address existing research challenges and promote open opportunities, serving as an insightful guide for prospective researchers and engineers.
A Multi-agent Reinforcement Learning Approach for Efficient Client Selection in Federated Learning
Jan 09, 2022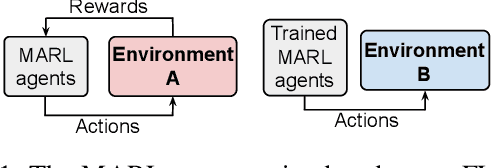

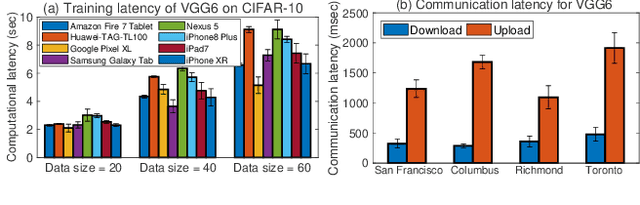

Federated learning (FL) is a training technique that enables client devices to jointly learn a shared model by aggregating locally-computed models without exposing their raw data. While most of the existing work focuses on improving the FL model accuracy, in this paper, we focus on the improving the training efficiency, which is often a hurdle for adopting FL in real-world applications. Specifically, we design an efficient FL framework which jointly optimizes model accuracy, processing latency and communication efficiency, all of which are primary design considerations for real implementation of FL. Inspired by the recent success of Multi-Agent Reinforcement Learning (MARL) in solving complex control problems, we present \textit{FedMarl}, an MARL-based FL framework which performs efficient run-time client selection. Experiments show that FedMarl can significantly improve model accuracy with much lower processing latency and communication cost.
Using Adversarial Attacks to Reveal the Statistical Bias in Machine Reading Comprehension Models
May 25, 2021



Pre-trained language models have achieved human-level performance on many Machine Reading Comprehension (MRC) tasks, but it remains unclear whether these models truly understand language or answer questions by exploiting statistical biases in datasets. Here, we demonstrate a simple yet effective method to attack MRC models and reveal the statistical biases in these models. We apply the method to the RACE dataset, for which the answer to each MRC question is selected from 4 options. It is found that several pre-trained language models, including BERT, ALBERT, and RoBERTa, show consistent preference to some options, even when these options are irrelevant to the question. When interfered by these irrelevant options, the performance of MRC models can be reduced from human-level performance to the chance-level performance. Human readers, however, are not clearly affected by these irrelevant options. Finally, we propose an augmented training method that can greatly reduce models' statistical biases.
Succinct and Robust Multi-Agent Communication With Temporal Message Control
Oct 27, 2020

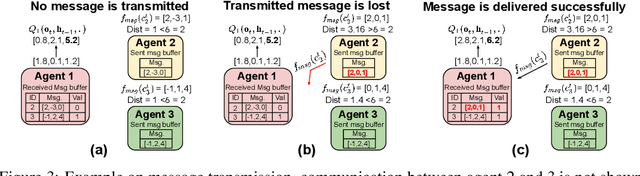
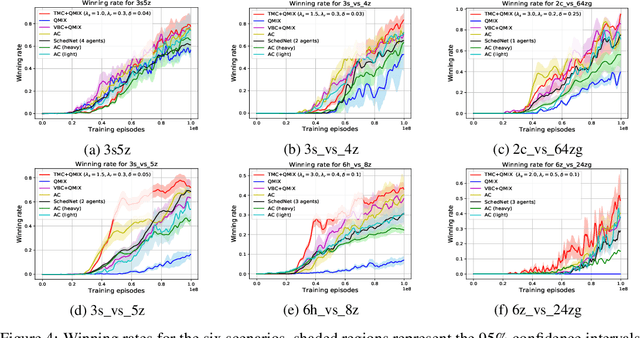
Recent studies have shown that introducing communication between agents can significantly improve overall performance in cooperative Multi-agent reinforcement learning (MARL). However, existing communication schemes often require agents to exchange an excessive number of messages at run-time under a reliable communication channel, which hinders its practicality in many real-world situations. In this paper, we present \textit{Temporal Message Control} (TMC), a simple yet effective approach for achieving succinct and robust communication in MARL. TMC applies a temporal smoothing technique to drastically reduce the amount of information exchanged between agents. Experiments show that TMC can significantly reduce inter-agent communication overhead without impacting accuracy. Furthermore, TMC demonstrates much better robustness against transmission loss than existing approaches in lossy networking environments.
On the Robustness of Cooperative Multi-Agent Reinforcement Learning
Mar 08, 2020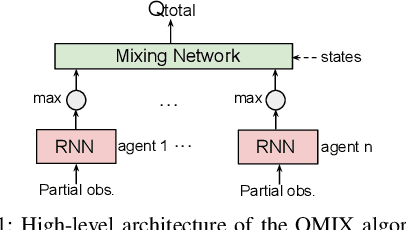
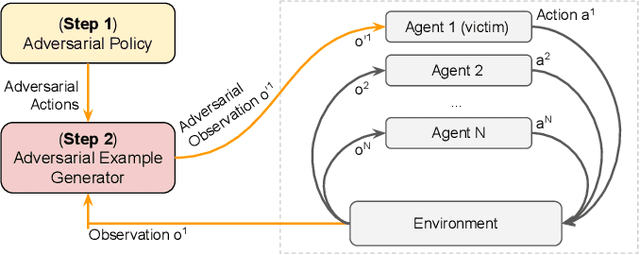

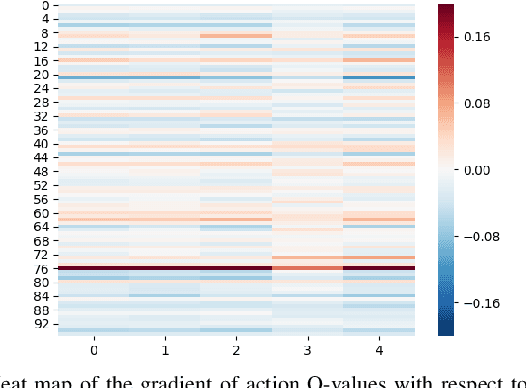
In cooperative multi-agent reinforcement learning (c-MARL), agents learn to cooperatively take actions as a team to maximize a total team reward. We analyze the robustness of c-MARL to adversaries capable of attacking one of the agents on a team. Through the ability to manipulate this agent's observations, the adversary seeks to decrease the total team reward. Attacking c-MARL is challenging for three reasons: first, it is difficult to estimate team rewards or how they are impacted by an agent mispredicting; second, models are non-differentiable; and third, the feature space is low-dimensional. Thus, we introduce a novel attack. The attacker first trains a policy network with reinforcement learning to find a wrong action it should encourage the victim agent to take. Then, the adversary uses targeted adversarial examples to force the victim to take this action. Our results on the StartCraft II multi-agent benchmark demonstrate that c-MARL teams are highly vulnerable to perturbations applied to one of their agent's observations. By attacking a single agent, our attack method has highly negative impact on the overall team reward, reducing it from 20 to 9.4. This results in the team's winning rate to go down from 98.9% to 0%.
Efficient Communication in Multi-Agent Reinforcement Learning via Variance Based Control
Sep 06, 2019


Multi-agent reinforcement learning (MARL) has recently received considerable attention due to its applicability to a wide range of real-world applications. However, achieving efficient communication among agents has always been an overarching problem in MARL. In this work, we propose Variance Based Control (VBC), a simple yet efficient technique to improve communication efficiency in MARL. By limiting the variance of the exchanged messages between agents during the training phase, the noisy component in the messages can be eliminated effectively, while the useful part can be preserved and utilized by the agents for better performance. Our evaluation using a challenging set of StarCraft II benchmarks indicates that our method achieves $2-10\times$ lower in communication overhead than state-of-the-art MARL algorithms, while allowing agents to better collaborate by developing sophisticated strategies.