 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysically Feasible Vehicle Trajectory Prediction
Apr 29, 2021
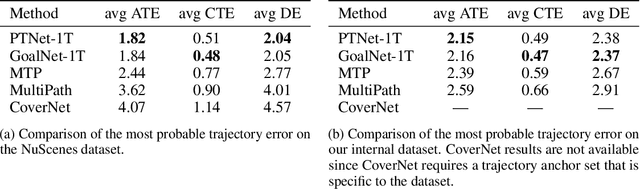
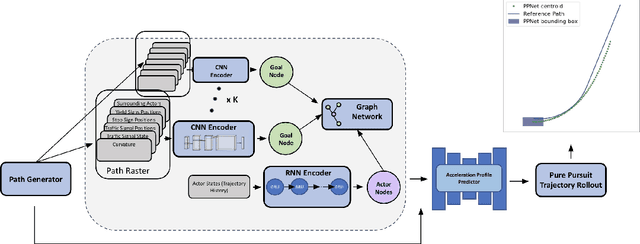
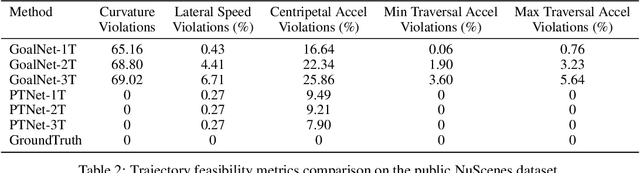
Predicting the future motion of actors in a traffic scene is a crucial part of any autonomous driving system. Recent research in this area has focused on trajectory prediction approaches that optimize standard trajectory error metrics. In this work, we describe three important properties -- physical realism guarantees, system maintainability, and sample efficiency -- which we believe are equally important for developing a self-driving system that can operate safely and practically in the real world. Furthermore, we introduce PTNet (PathTrackingNet), a novel approach for vehicle trajectory prediction that is a hybrid of the classical pure pursuit path tracking algorithm and modern graph-based neural networks. By combining a structured robotics technique with a flexible learning approach, we are able to produce a system that not only achieves the same level of performance as other state-of-the-art methods on traditional trajectory error metrics, but also provides strong guarantees about the physical realism of the predicted trajectories while requiring half the amount of data. We believe focusing on this new class of hybrid approaches is an useful direction for developing and maintaining a safety-critical autonomous driving system.
Interaction-Based Trajectory Prediction Over a Hybrid Traffic Graph
Sep 27, 2020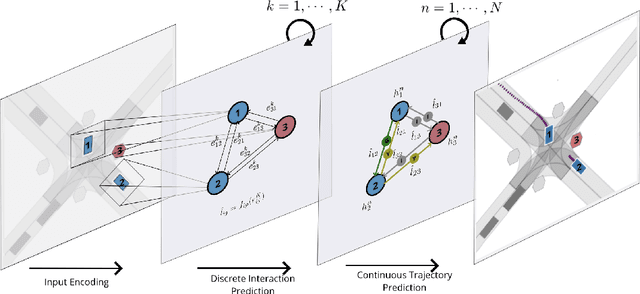
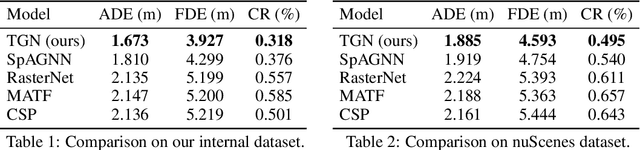
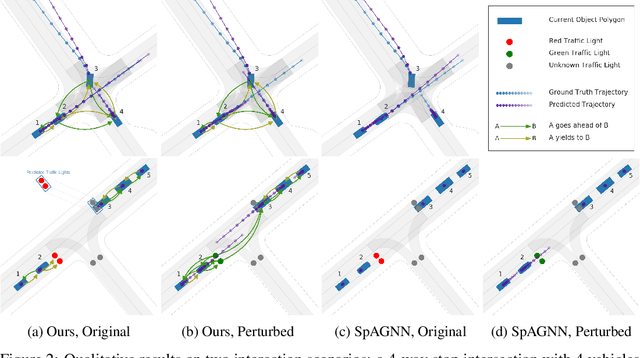
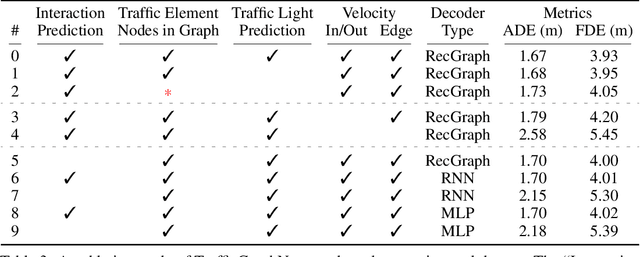
Behavior prediction of traffic actors is an essential component of any real-world self-driving system. Actors' long-term behaviors tend to be governed by their interactions with other actors or traffic elements (traffic lights, stop signs) in the scene. To capture this highly complex structure of interactions, we propose to use a hybrid graph whose nodes represent both the traffic actors as well as the static and dynamic traffic elements present in the scene. The different modes of temporal interaction (e.g., stopping and going) among actors and traffic elements are explicitly modeled by graph edges. This explicit reasoning about discrete interaction types not only helps in predicting future motion, but also enhances the interpretability of the model, which is important for safety-critical applications such as autonomous driving. We predict actors' trajectories and interaction types using a graph neural network, which is trained in a semi-supervised manner. We show that our proposed model, TrafficGraphNet, achieves state-of-the-art trajectory prediction accuracy while maintaining a high level of interpretability.
Map-Adaptive Goal-Based Trajectory Prediction
Sep 09, 2020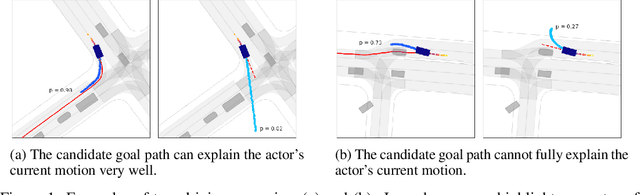
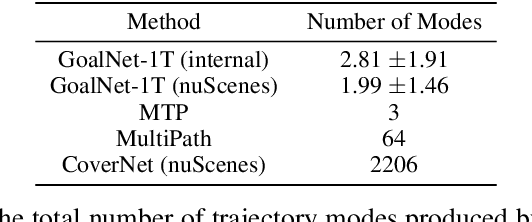
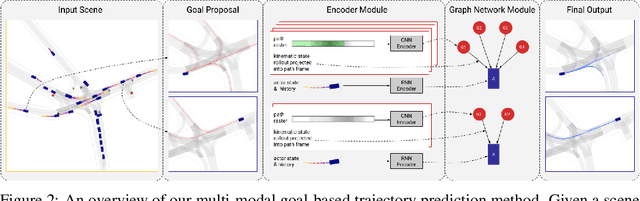
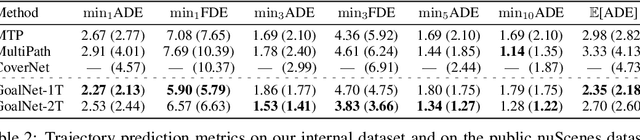
We present a new method for multi-modal, long-term vehicle trajectory prediction. Our approach relies on using lane centerlines captured in rich maps of the environment to generate a set of proposed goal paths for each vehicle. Using these paths -- which are generated at run time and therefore dynamically adapt to the scene -- as spatial anchors, we predict a set of goal-based trajectories along with a categorical distribution over the goals. This approach allows us to directly model the goal-directed behavior of traffic actors, which unlocks the potential for more accurate long-term prediction. Our experimental results on both a large-scale internal driving dataset and on the public nuScenes dataset show that our model outperforms state-of-the-art approaches for vehicle trajectory prediction over a 6-second horizon. We also empirically demonstrate that our model is better able to generalize to road scenes from a completely new city than existing methods.
Joint Interaction and Trajectory Prediction for Autonomous Driving using Graph Neural Networks
Dec 17, 2019
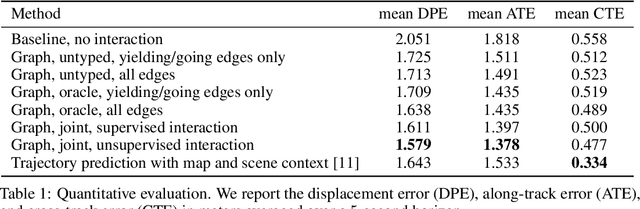
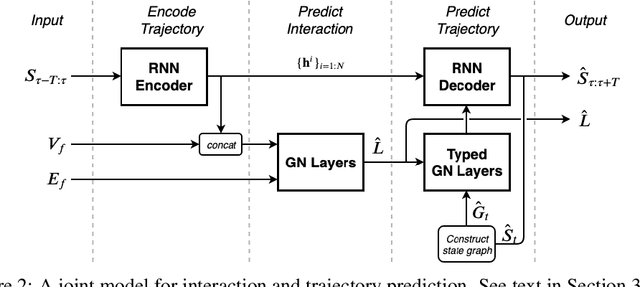
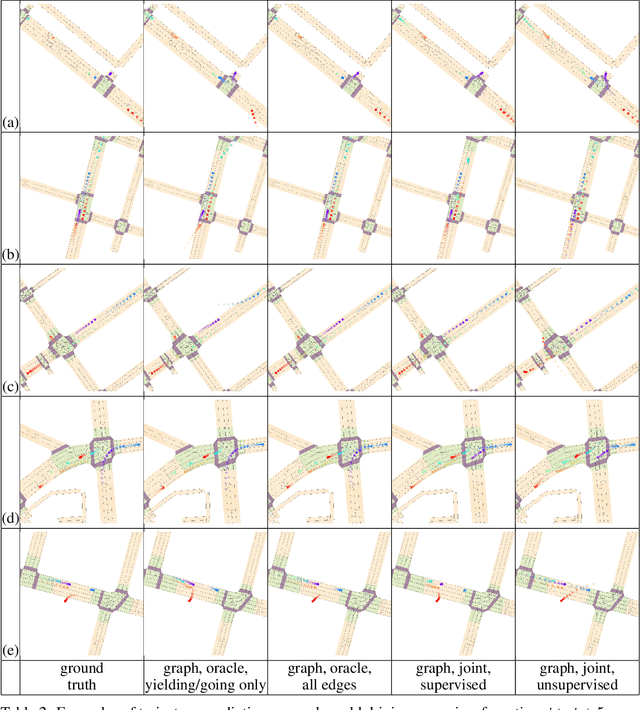
In this work, we aim to predict the future motion of vehicles in a traffic scene by explicitly modeling their pairwise interactions. Specifically, we propose a graph neural network that jointly predicts the discrete interaction modes and 5-second future trajectories for all agents in the scene. Our model infers an interaction graph whose nodes are agents and whose edges capture the long-term interaction intents among the agents. In order to train the model to recognize known modes of interaction, we introduce an auto-labeling function to generate ground truth interaction labels. Using a large-scale real-world driving dataset, we demonstrate that jointly predicting the trajectories along with the explicit interaction types leads to significantly lower trajectory error than baseline methods. Finally, we show through simulation studies that the learned interaction modes are semantically meaningful.
Benchmarking Model-Based Reinforcement Learning
Jul 03, 2019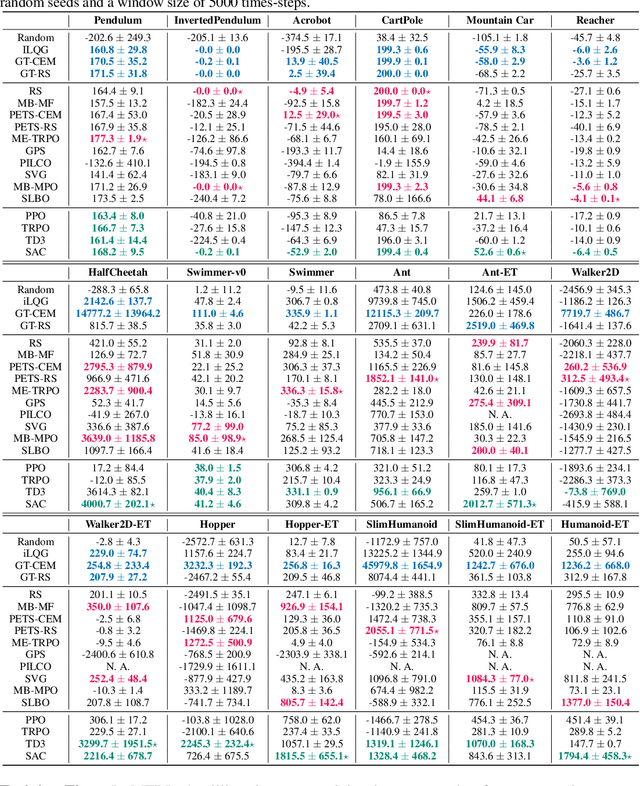
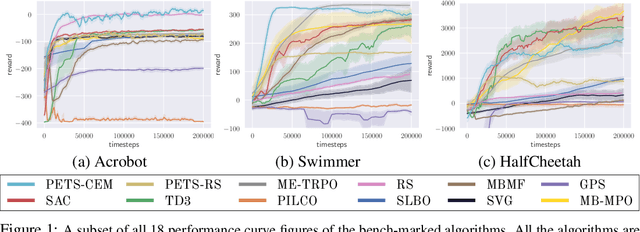
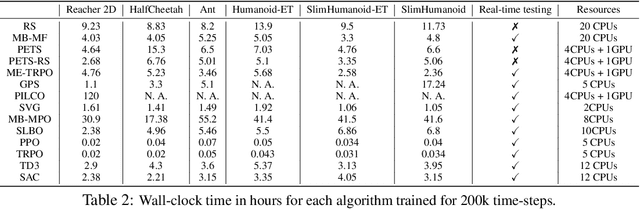
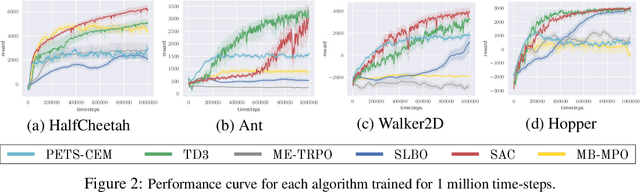
Model-based reinforcement learning (MBRL) is widely seen as having the potential to be significantly more sample efficient than model-free RL. However, research in model-based RL has not been very standardized. It is fairly common for authors to experiment with self-designed environments, and there are several separate lines of research, which are sometimes closed-sourced or not reproducible. Accordingly, it is an open question how these various existing MBRL algorithms perform relative to each other. To facilitate research in MBRL, in this paper we gather a wide collection of MBRL algorithms and propose over 18 benchmarking environments specially designed for MBRL. We benchmark these algorithms with unified problem settings, including noisy environments. Beyond cataloguing performance, we explore and unify the underlying algorithmic differences across MBRL algorithms. We characterize three key research challenges for future MBRL research: the dynamics bottleneck, the planning horizon dilemma, and the early-termination dilemma. Finally, to maximally facilitate future research on MBRL, we open-source our benchmark in http://www.cs.toronto.edu/~tingwuwang/mbrl.html.