 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysically Feasible Vehicle Trajectory Prediction
Apr 29, 2021
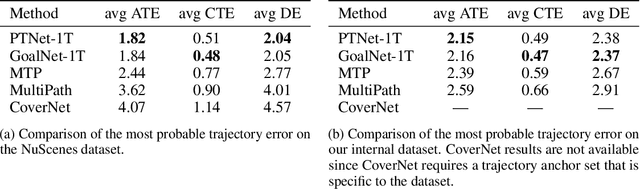
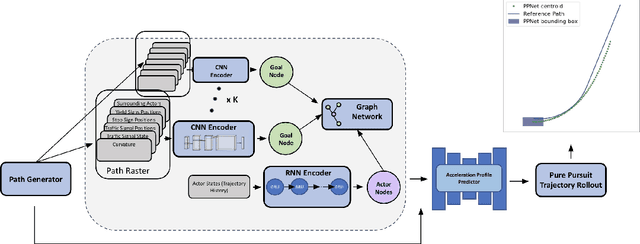
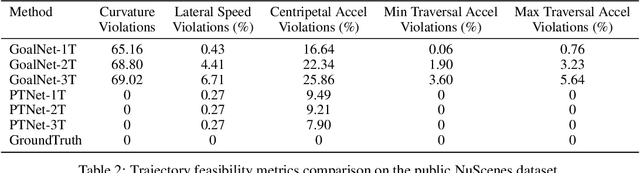
Predicting the future motion of actors in a traffic scene is a crucial part of any autonomous driving system. Recent research in this area has focused on trajectory prediction approaches that optimize standard trajectory error metrics. In this work, we describe three important properties -- physical realism guarantees, system maintainability, and sample efficiency -- which we believe are equally important for developing a self-driving system that can operate safely and practically in the real world. Furthermore, we introduce PTNet (PathTrackingNet), a novel approach for vehicle trajectory prediction that is a hybrid of the classical pure pursuit path tracking algorithm and modern graph-based neural networks. By combining a structured robotics technique with a flexible learning approach, we are able to produce a system that not only achieves the same level of performance as other state-of-the-art methods on traditional trajectory error metrics, but also provides strong guarantees about the physical realism of the predicted trajectories while requiring half the amount of data. We believe focusing on this new class of hybrid approaches is an useful direction for developing and maintaining a safety-critical autonomous driving system.
Ellipse Loss for Scene-Compliant Motion Prediction
Nov 05, 2020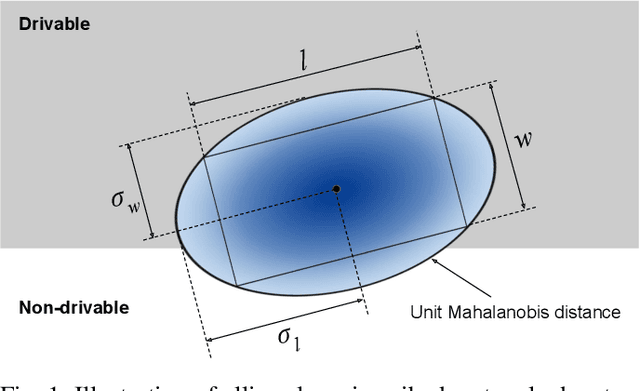
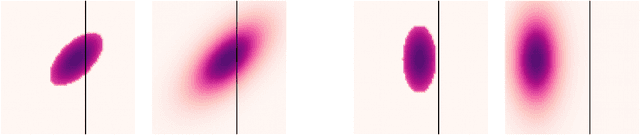
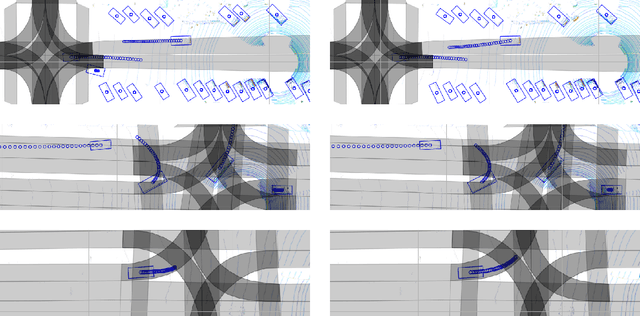

Motion prediction is a critical part of self-driving technology, responsible for inferring future behavior of traffic actors in autonomous vehicle's surroundings. In order to ensure safe and efficient operations, prediction models need to output accurate trajectories that obey the map constraints. In this paper, we address this task and propose a novel ellipse loss that allows the models to better reason about scene compliance and predict more realistic trajectories. Ellipse loss penalizes off-road predictions directly in a supervised manner, by projecting the output trajectories into the top-down map frame using a differentiable trajectory rasterizer module. Moreover, it takes into account the actor dimension and orientation, providing more direct training signals to the model. We applied ellipse loss to a recently proposed state-of-the-art joint detection-prediction model to showcase its benefits. Evaluation results on a large-scale autonomous driving data set strongly indicate that our method allows for more accurate and more realistic trajectory predictions.
Improving Movement Predictions of Traffic Actors in Bird's-Eye View Models using GANs and Differentiable Trajectory Rasterization
Apr 14, 2020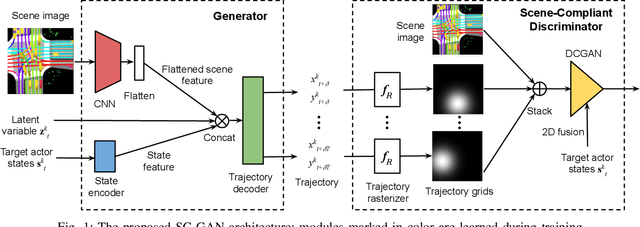

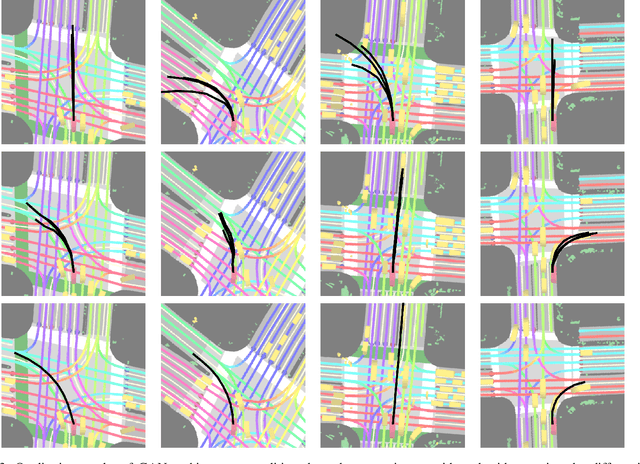
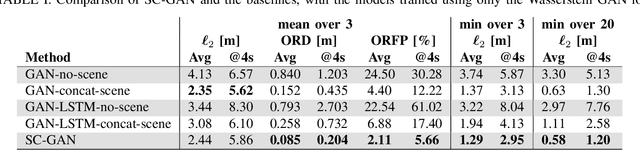
One of the most critical pieces of the self-driving puzzle is the task of predicting future movement of surrounding traffic actors, which allows the autonomous vehicle to safely and effectively plan its future route in a complex world. Recently, a number of algorithms have been proposed to address this important problem, spurred by a growing interest of researchers from both industry and academia. Methods based on top-down scene rasterization on one side and Generative Adversarial Networks (GANs) on the other have shown to be particularly successful, obtaining state-of-the-art accuracies on the task of traffic movement prediction. In this paper we build upon these two directions and propose a raster-based conditional GAN architecture, powered by a novel differentiable rasterizer module at the input of the conditional discriminator that maps generated trajectories into the raster space in a differentiable manner. This simplifies the task for the discriminator as trajectories that are not scene-compliant are easier to discern, and allows the gradients to flow back forcing the generator to output better, more realistic trajectories. We evaluated the proposed method on a large-scale, real-world data set, showing that it outperforms state-of-the-art GAN-based baselines.
Long-term Prediction of Vehicle Behavior using Short-term Uncertainty-aware Trajectories and High-definition Maps
Mar 13, 2020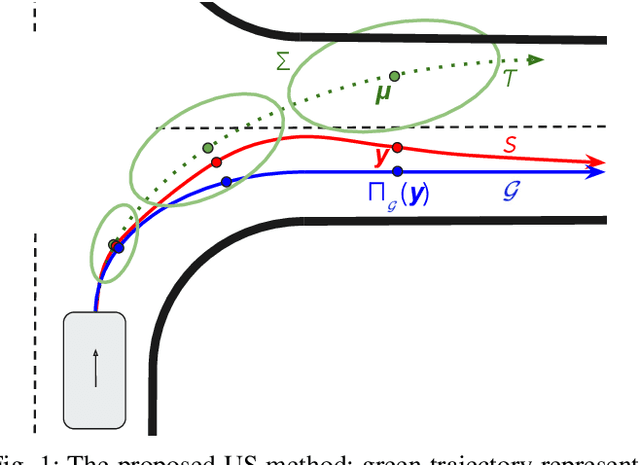
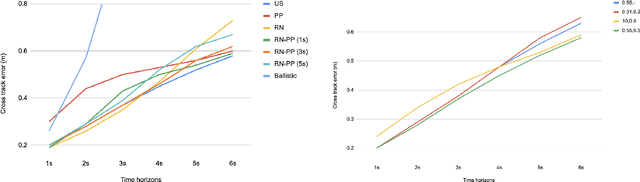
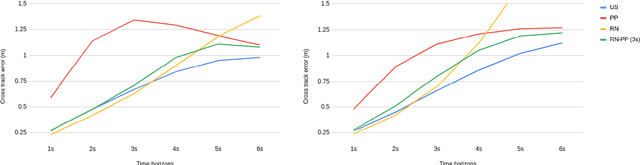
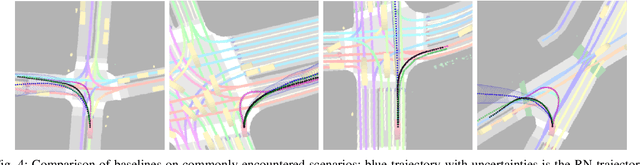
Motion prediction of surrounding vehicles is one of the most important tasks handled by a self-driving vehicle, and represents a critical step in the autonomous system necessary to ensure safety for all the involved traffic actors. Recently a number of researchers from both academic and industrial community focused on this important problem, proposing ideas ranging from engineered, rule-based methods to learned approaches, shown to perform well at different prediction horizons. In particular, while for longer-term trajectories the engineered methods outperform the competing approaches, the learned methods have proven to be the best choice at short-term horizons. In this work we describe how to overcome the discrepancy between these two research directions, and propose a method that combines the disparate approaches under a single unifying framework. The resulting algorithm fuses learned, uncertainty-aware trajectories with lane-based paths in a principled manner, resulting in improved prediction accuracy at both shorter- and longer-term horizons. Experiments on real-world, large-scale data strongly suggest benefits of the proposed unified method, which outperformed the existing state-of-the-art. Moreover, following offline evaluation the proposed method was successfully tested onboard a self-driving vehicle.